Teknik och Samhälle Datavetenskap
Examensarbete 15 högskolepoäng, grundnivå
Positioneringssystem med
applikationsspecifika och platsknutna funktioner
för en zonindelad inomhusmiljö
Positioning system with application-specific and location-based functions
for a zoned indoor environment
Andreas Bjärntoft Karl Mösenbacher
Examen: Högskoleingenjör 180 hp Handledare: Ivan Kruzela Huvudområde: Datateknik och Mobil IT Examinator: Magnus Krampell Datum: 2016-06-03
Sammanfattning
Denna rapport presenterar ett proof-of-concept avseende inomhuspositionering, baserat på Bluetooth-fyrar och mobiltelefoner, kombinerat med ett system för besökshantering. Detta mot bakgrunden av ett önskemål om att underlätta interaktionen mellan lärare och studenter på Malmö högskola.
Till följd av att viss verksamhet på Malmö högskola flyttat till nya lokaler har lärarnas arbetsplatser förändrats, vilket lett fram till att studenterna har svårt att dels lokalisera tillgängliga lärare och dels initiera besök utan att störa andra lärare. Genom att upprätta en prioriterad kravspecifikation utifrån MoSCoW-metoden, baserat på intervju- och enkätsvar från lärare, identifieras kraven till ett system för positionering av lärare samt tillhörande system för besökshantering.
Utifrån Pahl’s utvecklingsprocess för framtagning av en teknisk artefakt analyseras och utvärderas olika lösningsalternativ för inomhuspositionering, vilket leder fram till ett förslag avseende en prototyp. Prototypen avser symbolisk positionering i ett system för närhetsdetektering utifrån fördefinierade zoner, baserat på aktiva mobiltelefoner och passiva Bluetooth-fyrar.
Slutligen implementeras framtagen prototyp för inomhuspositionering, i kombination med ett system för besökshantering, för att visa på dess genomförbarhet. Detta i form av en summerad systemvy som även inkluderar en molnbaserad databas, ett webbgränssnitt och två Android-applikationer.
Nyckelord: inomhuspositionering, zonindelad inomhusmiljö, närhetsdetektering, besökshantering, Bluetooth, mobiltelefon
Abstract
This report presents a proof-of-concept regarding indoor positioning based on Bluetooth beacons and mobile phones, combined with a system for visitor management. This against the background of a desire to facilitate the interaction between teachers and students at Malmö University.
As a result of that Malmö University moved to new facilities, the teachers' workplaces changed, which led to students having difficulty locating available teachers and initiate visits without disturbing other teachers. By establishing a prioritized requirement specification based on MoSCoW method, which is a result of interviews and survey responses from teachers, the requirements are identified for a system for the positioning of teachers and related systems for visitor management.
Based on Pahl's development process for the preparation of a technical artifact, some different solutions for indoor positioning is analyzed and evaluated, leading to a proposal regarding a prototype. The prototype relates to symbolic positioning in a system for proximity detection by predefined zones, based on active mobile phones and passive Bluetooth beacons.
Finally, the prototyp for indoor positioning is then implemented in combination with a system for visitor management to demonstrate its feasibility. This in the form of a summed system view that includes a cloud-based database, a web interface and two Android applications. Keywords: indoor positioning, zone based indoor environment, proximity detection, visitor
Förord
Vi vill börja med att tacka vår handledare Ivan Kruzela på Malmö högskola för hans entusiasm, engagemang och inspirerande personlighet. Han har under arbetets gång alltid ställt upp för oss, från tidiga morgnar till sena kvällar. Detta har motiverat oss, inspirerat oss och givit oss ett stort nöje i att färdigställa rapporten. Tack för all din hjälp!
Vi vill även tacka de lärare på Malmö högskola som velat bidra till vårt arbete genom att ställa upp på våra intervjuer samt besvara vår enkät.
Slutligen vill vi även tacka våra familjer för ert nästintill gränslösa tålamod, er förståelse, er uppmuntran och er vilja att stötta oss genom bl.a. korrekturläsning. Ni har gjort det möjligt för oss att genomföra detta arbete och det är vi evigt tacksamma för!
Innehållsförteckning
1 Inledning ... 1 1.1 Bakgrund ... 1 1.2 Problemområde ... 2 1.3 Problemformulering ... 2 1.4 Avgränsningar ... 3 2 Teoretisk bakgrund ... 4 2.1 Inomhuspositionering ... 4 2.2 Elektromagnetisk strålning ... 5 2.2.1 Wi-Fi ... 6 2.2.2 Bluetooth ... 6 2.3 Ljud ... 8 3 Relaterade arbeten ... 93.1 Byun m.fl. - S-Beacon: Next Generation BLE Beacon Solution for Enhanced Personalization ... 9
3.2 Chawathe – Beacon Placement for Indoor Localization using Bluetooth ... 9
3.3 Jiang m.fl. - Design and Evaluation of a Wireless Magnetic-based Proximity Detection Platform for Indoor Applications ... 9
3.4 Lujan m.fl. - Deeploc: Discreet Indoor People Location Application ... 10
3.5 Mainetti m.fl. - A Survey on Indoor Positioning Systems ... 10
3.6 Yang m.fl. - An Area Zoning Based WLAN Location System ... 10
4 Metod ... 12
4.1 Övergripande metod ... 12
4.2 Kravspecifikation ... 12
4.3 Utvecklingsprocess ... 13
5 Resultat och analys ... 14
5.1 Kravspecifikation ... 14
5.2 Lösningsförslag och prototyp ... 15
5.2.1 Analys och utvärdering inom området kategori ... 15 5.2.2 Analys och utvärdering inom området arkitektur ... 16 5.2.3 Analys och utvärdering inom området strategi ... 17 5.2.4 Analys och utvärdering inom området teknik ... 18 5.2.5 Beslut ... 19 5.3 Implementation ... 20 5.3.1 Positionering ... 21 5.3.2 Besökshantering ... 23 5.3.3 Summerad systemvy ... 23 6 Diskussion ... 27
6.1 Utmaningar med inomhuspositionering ... 27
6.2 Jämförelse med liknande system ... 28
6.3 Bluetooth som teknik för inomhuspositionering ... 29
6.4 Besökshantering ... 30
6.5 Personlig integritet ... 31
6.6 Mer omfattande implementering ... 31
7 Slutsats ... 32
7.1 Fortsatt arbete ... 32
Referenser ... 34 Förkortningar och definitioner ... 37 Appendix A – Kravhantering
Appendix B – Server
Appendix C – Android-applikationer Appendix D – Mätning av Bluetooth-fyrar
1
Inledning
Rapportens fokus har legat inom området inomhuspositionering. Utifrån rapportens bakgrund har det problemområde som ligger till grund för rapportens problemformulering och dess avgränsningar definierats.
1.1 Bakgrund
Enligt Findahl [1] har Internet funnits i mer än tjugo år och dess spridning pågår än idag, både när det gäller tillgången och användandet. Sverige är ett av de länder som ligger högt på listan över användningen av Internet i Europa. Den höga nivån av Internetanvändare kan till stor del tillskrivas den smarta mobilen och surfplattan. Efter Internets första spridningsfas och den efterföljande bredbandsfasen är utvecklingen nu inne i en mobil fas. Spridningen och användandet av smarta mobiler har stigit kraftigt bland den svenska befolkningen under de senaste åren, från 22 procent år 2010 till 73 procent år 2014. En av anledningarna är möjligheten att koppla upp sig till Internet via trådlösa nätverk. Det är dock inte bara antalet användare av smarta mobiler som har ökat under de senaste åren utan den smarta mobilen används även betydligt oftare idag än tidigare. Detta innebär att det ständigt kommer nya tjänster och nya sätt att använda den smarta mobilen på, exempelvis för navigering via GPS (Global Positioning System).
Enligt Piffer m.fl. [2] är en majoritet av de kart- och navigeringssystem som idag finns tillgängliga avsedda att användas utomhus. Intresset för inomhusnavigering anses dock öka, såväl bland mindre och mer specificerade företag som bland de stora aktörerna som exempelvis Google och Apple. Gutierrez m.fl. [3] menar att även om GPS är ett av de vanligaste systemen för positionering så är systemet inte anpassat för inomhuspositionering. Systemet är i hög grad beroende av fri sikt mellan GPS-satellit och mottagare, vilket innebär att väggar, höga byggnader och andra former av hinder leder till signalstörningar och begränsad signalmottagning. Av denna anledning anses GPS inte vara en hållbar lösning för inomhuspositionering.
På samma sätt som GPS förändrade hur människor positioneras utomhus skulle ett system för inomhuspositionering ha potential att förändra hur människor positioneras inomhus. I över tio år har såväl den akademiska världen som företag lagt ner mycket arbete och resurser på att hitta lösningar som möjliggör inomhuspositionering. Bland de existerande lösningarna finns dels de som utnyttjar befintliga system som exempelvis Wi-Fi (Wireless Fidelity), GSM (Global System for Mobile Communications) och jordens magnetfält, dels de som bygger på anpassade referenspunkter som exempelvis Bluetooth, ultraljud, infrarött ljus och magnetiska signaler. Även om ett stort antal olika tillvägagångssätt har föreslagits sedan utvecklingens början anses inomhuspositionering fortfarande vara ett olöst koncept. Ingen gemensam och brett accepterad lösning har tagits fram. Det finns inte heller någon lösning eller kombination av lösningar som kan omsätta GPS-teknikens upplevelse till inomhusmiljöer [4].
Den smarta mobilens förmåga att utnyttja olika former av nätverkstekniker gör den till ett potentiellt verktyg för inomhuspositionering. En isolerad positionsbestämmelse i en inomhusmiljö kan dock anses ha ett begränsat användningsområde. Genom att kombinera en positionsbestämmelse med applikationsspecifika och platsknutna funktioner utökas såväl möjligheterna som användningsområdet [5]. Exempelvis kan inomhuspositionering användas av poliser, brandmän och sjukvårdspersonal för att lokalisera personer i nöd, av företag för att
lokalisera varor på lager och i butik eller av sjukvårdsinrättningar för att lokalisera och övervaka patienter [3].
Mot bakgrund av ett önskemål från Malmö högskola syftar rapporten till att behandla ett specifikt exempel på hur positionsbestämmelse i en inomhusmiljö kan kombineras med applikationsspecifika och platsknutna funktioner.
1.2 Problemområde
I samband med att delar av Malmö högskolas verksamhet har flyttat till nya lokaler så har lärarnas arbetsplatser förändrats, från arbetsrum i allmänt tillgängliga utrymmen till kontorslandskap med tillträde baserat på behörighet. Denna förändring upplevs som en försämring av interaktionen mellan lärare och studenter.
Till följd av att lärarnas arbetsplatser utgörs av öppna kontorslandskap i en aktivitetsbaserad arbetsmiljö, som dessutom är låst för studenter, är det svårt för studenter att dels lokalisera tillgängliga lärare och dels initiera besök utan att störa andra lärare. Genom att presentera ett proof-of-concept1, där en funktion för positionsbestämmelse av lärare kombineras med en
funktion för besökshantering mellan lärare och studenter, är avsikten att ge ett exempel på hur interaktionen mellan lärare och studenter på Malmö högskola kan underlättas.
1.3 Problemformulering
Rapporten behandlar två separata perspektiv: ett generiskt perspektiv och ett mer specifikt perspektiv. Utifrån det generiska perspektivet avser rapporten att presentera hur mobiltelefoner kan användas för att positionera personer i en inomhusmiljö. Utifrån ett mer specifikt perspektiv avser rapporten att generera ett antal lösningsförslag, presentera en prototyp för inomhuspositionering samt visa på dess genomförbarhet i kombination med applikationsspecifika och platsknutna funktioner. Resultatet avser dock inte att vara begränsat till Malmö högskola utan kommer även vara möjligt att implementera i andra miljöer.
De frågor som rapporten avser att besvara är följande:
• Hur kan olika tekniker användas för inomhuspositionering? (Generisk fråga)
• Hur kan ett system för inomhuspositionering av lärare utformas och implementeras på en mobil plattform? (Specifik fråga)
• Hur kan ett besökshanteringssystem implementeras utifrån valt system för inomhuspositionering? (Specifik fråga)
1.4 Avgränsningar
Rapporten behandlar de teknologier och kommunikationsmetoder som bedöms ha en bred förankring bland moderna mobiltelefoner. Detta innebär att rapportens delar som behandlar positionering enbart omfattar Wi-Fi, Bluetooth och ljud. Den implementation som rapporten inkluderar har enbart för avsikt att omfatta Android-baserade enheter och webbgränssnitt, utan direkt fokus på användarupplevelse. Implementationen som gjorts avseende Android-applikation, webbgränssnitt och databas är enbart att betrakta som ett proof-of-concept, vilket innebär att dessa delar inte utvärderas.
2
Teoretisk bakgrund
I syfte att förstå rapportens resultat, analys och diskussion redovisar detta avsnitt nödvändig och relevant teori inom områdena inomhuspositionering, Wi-Fi, Bluetooth och ljud. Denna redovisning omfattar enbart de teoretiska områdena som är direkt nödvändiga för att förstå helheten, vilket innebär att områden som på förhand har avgränsats inte inkluderas.
2.1 Inomhuspositionering
Begreppet inomhuspositionering kan definieras som ett system med förmåga att ge positionsbestämmelse av ett objekt i en sluten miljö, så som exempelvis varuhus, sjukhus eller kontor. Till följd av den komplexa karaktär som inomhusmiljön vanligtvis utgörs av finns det tydliga utmaningar förknippade med utvecklingen av ett system för inomhuspositionering. Små utrymmen, begränsad sikt samt hinder i form av bl.a. väggar, möbler och människor leder till signalförändringar i de positioneringssystem som baseras på elektromagnetisk strålning eller ljud, vilket kan påverka noggrannheten i systemets positionsbestämmelse [6].
Användandet av inomhuspositionering och dess syfte kan kategoriseras utifrån: fysisk positionering, symbolisk positionering, absolut positionering och relativ positionering. Fysisk positionering är den form av inomhuspositionering som syftar till att generera precisa koordinater för ett objekt utifrån ett vedertaget koordinatsystem. Symbolisk positionering syftar däremot till att positionera ett objekt utifrån ett mer naturligt språkbruk, exempelvis på kontoret, på restaurangen eller i korridoren på tredje våningen. Vidare syftar absolut positionering till att positionera ett objekt utifrån en lokal referensram som är gemensam för samtliga positionerade objekt. Slutligen syftar relativ positionering till att positionera ett objekt utifrån en individuell referensram, ofta i förhållande till kända referenspunkter [7].
För att få ett trådlöst system för inomhuspositionering att fungera måste minst en sändande och en avlyssnande/mätande hårdvaruenhet ingå. Vad enheterna använder för trådlös kommunikationsteknik kan dock variera [7]. Ett system av detta slag kan antingen utgå från en aktiv arkitektur eller från en passiv arkitektur. I en aktiv arkitektur utgör fyren den sändande enheten medan objektet som ska positioneras utgör den avlyssnande/mätande enheten. I en passiv arkitektur är däremot förhållandet det omvända. Oavsett arkitektur är det dock den avlyssnande/mätande enheten som kräver störst mjukvaruimplementation [8].
Enligt Abdat m.fl. [8] finns det i huvudsak tre möjliga strategier för inomhuspositionering: närhetsdetektering (eng. proximity), triangulering (eng. triangulation) och platsanalys (eng. scene analysis). Strategin för närhetsdetektering bygger på att en eller flera detektionsenheter placeras ut på fasta positioner. När ett objekt upptäcks av en av dessa detektionsenheter bedöms objektets position vara inom det område som detektionsenhetens täcker. Triangulering är en strategi som används för att beräkna ett objekts position, baserat på uppmätt signalstyrka från flera olika referenspunkter. Platsanalys baseras däremot på en strategi där inomhusmiljön först analyseras genom att signalstyrkan från ett antal olika referenspunkterna mäts och kartläggs. När detta är gjort kan positioneringen av ett objekt ske genom att objektet i en viss position mäter signalstyrka i realtid och jämför detta med den kartläggning som tidigare gjorts.
Ett fungerande system för inomhuspositionering kan utvärderas samt jämföras med andra system för inomhuspositionering. Detta är möjligt med hjälp av följande prestandakriterier [6]:
• Noggrannhet – objektets faktiska position och systemets uppskattade positionsbestämmelse.
• Responsivitet – hur snabbt systemet genomför positionsbestämmelsen. • Täckningsområde – område inom vilket systemet kan genomföra en
positionsbestämmelse. Detta område kan antingen vara lokalt, skalbart eller globalt. • Anpassningsförmåga – systemets förmåga att anpassa sig till förändringar i
inomhusmiljön, vilket kan kopplas till behovet av kalibrering.
• Skalbarhet – systemets förmåga att hantera en ökning av antalet positionsbestämda objekt samt ett ökat täckningsområde.
• Kostnad och komplexitet – de resurser systemet kräver för att kunna implementeras och skötas. Detta inkluderar en bred tolkning av begreppet resurser då det kan
innehålla allt från direkta kostnader för installation, hårdvara och mjukvara till energibehov, livslängd och vikt. Även systemets komplexitet ingår i kriteriet.
2.2 Elektromagnetisk strålning
Elektromagnetisk strålning spänner över ett brett spektrum, från ca 10 kHz för radiovågor upp till ca 10 EHz för gammastrålning [9]. Inom detta spektrum återfinns kommunikations-protokollen för såväl Wi-Fi som Bluetooth. Båda kommunikationskommunikations-protokollen utnyttjar ett frekvensband runt 2,4 GHz, där Wi-Fi även har möjlighet att utnyttja ett frekvensband runt 5,0 GHz. Med en effektnivå vid sändning på upp till 100 mW2 tillåter de båda kommunikationsprotokollen trådlös kommunikation på avstånd upp till ca 100 meter. Wi-Fi är i huvudsak orienterad mot kommunikation på längre avstånd (upp emot 100 meter) medan Bluetooth i huvudsak är orienterad mot kommunikation på kortare avstånd. Detta leder till att strömförbrukningen för Wi-Fi normalt sett ligger på ca 100-350 mA medan den för Bluetooth enbart ligger på ca 1-35 mA [10].
Effektnivån på all elektromagnetisk strålning är omvänt proportionellt till kvadraten av avståndet från sändaren, vilket innebär att Wi-Fi- respektive Bluetooth-signaler kan användas för att beräkna avståndet mellan en sändare och en mottagare. Den effektnivå som mottagaren registrerar (eng. Received Signal Strength, RSS) behöver dock omvandlas till ett värde som indikerar styrkan på den mottagna signalen, s.k. RSSI (Received Signal Strength Indicator) i enheten dBm. För att uppnå detta applicerar mottagaren en offset på den mottagna signalen för att kalibrera denna till rätt nivå [11].
Många positioneringssystem för inomhusmiljö, baserade på elektromagnetisk strålning så som Wi-Fi och Bluetooth, utnyttjar det faktum att signalstyrkan från en sändande enhet minskar med ökat avstånd. Genom att mäta RSSI mellan sändande och mottagande enhet i ett positioneringssystem kan avståndet mellan enheterna också beräknas. Viktigt att uppmärksamma är dock att denna metod är relativt känslig för förändringar i en inomhusmiljö [6].
2.2.1 Wi-Fi
Wi-Fi är ursprungligen ett begrepp för certifiering av produkter som hanterar trådlösa nätverk, baserade på standarder inom familjen IEEE 802.11 [12]. Numera används dock begreppet Wi-Fi för att mer generellt beteckna WLAN (Wireless Local Area Network) som kommunicerar över standarder inom denna familj [13].
Konceptet bakom upptäckt och identifikation av Wi-Fi-nätverk baseras på att de trådlösa nätverken periodiskt sänder ut små meddelanden, även kallade beacons, till sin omgivning. Dessa beacons innebär att det trådlösa nätverket synliggörs och dess identitet (eng. Service Set Identifier, SSID) förmedlas. Genom att låta klienterna skanna av sin omgivning kan tillgängliga Wi-Fi-nätverk upptäckas [14]. En klient kan använda sig av två olika former av skanning: aktiv eller passiv. Aktiv skanning innebär att klienten sänder ut en förfrågan och lyssnar efter gensvar. Passiv skanning innebär däremot att klienten enbart lyssnar efter beacons på samtliga kommunikationskanaler, vilket generellt sett tar längre tid [15].
Två huvudsakliga tekniker finns för inomhuspositionering med hjälp av Wi-Fi: fingeravtrycksmetoden (eng. fingerprinting) och radiospridningsmetoden (eng. radio propagation modeling). Fingeravtrycksmetoden baseras på en inlärningsfas och en positioneringsfas. Under inlärningsfasen samlas data in genom att accesspunkternas signalstyrka mäts och kartläggs. Under positioneringsfasen mäts accesspunkternas signalstyrka i realtid och jämförs med kartläggningen från inlärningsfasen. Utifrån uppmätt signalstyrka under positioneringsfasen och kartläggningen under inlärningsfasen kan positionen bestämmas. Radiospridningsmetoden bygger däremot på signalutbredningsteorier för inomhusmiljöer. Utifrån matematiska modeller och uppmätt signalstyrka från accesspunkterna kan positionen beräknas [16].
Att använda Wi-Fi som en teknik för inomhuspositionering har visat sig vara användbart enligt ett antal rapporter. Gutierrez m.fl. [3] presenterar exempelvis ett system för inomhuspositionering med hjälp av Wi-Fi, mobiltelefoner och uppmätt signalstyrka. Genom att kartlägga signalstyrkan från ett antal accesspunkter och koppla dessa till olika inomhuspositioner och våningsplan kan positionen, enligt artikelns författare, fastställas med hög noggrannhet i 80 procent av fallen utifrån användarens mobiltelefon. Ett annat exempel är Agata m.fl. [17] som presenterar ett system för närhetsdetektering i inomhusmiljö med hjälp av Wi-Fi via accesspunkter, mobila enheter och uppmätt signalstyrka. Genom att mäta signalstyrkan från flera närliggande accesspunkter kan den fysiska närvaron av en mobil enhet knytas till ett specifikt rum i över 95% av fallen. Detta innebär, enligt artikelns författare, att tekniken kan användas för att öka säkerheten i Wi-Fi-nätverk genom att enbart ge tillträde till de mobila enheter som detekteras inom nätverkets fysiska område.
2.2.2 Bluetooth
Bluetooth har utvecklats i syfte att vara ett trådlöst alternativ till trådbunden kortdistans-kommunikation. Detta innebär att Bluetooth kan användas för WPAN (Wireless Personal Area Network), som bygger på IEEE 802.15 standarden [18].
Kommunikationen i ett Bluetooth-nätverk baseras på principen kring master och slave. Ett Bluetooth-nätverk som består av en master-enhet och minst en slave-enhet kallas för ett piconet, vilket maximalt kan utgöras av en master-enhet och sju anslutna slave-enheter. Master-enhetens
huvudsakliga uppgift är att synkronisera den frekvens och de kanaler som används för kommunikationen, men även att allokera och blockera bandbredden på nya anslutningar. Master-enheten är även ansvarig för ett piconets synkroniseringsklocka och val av frekvens för FHSS (Frequency-Hopping Spread Spectrum) [18]. Slave-enheterna i ett piconet detekteras (enligt Figur 1) genom en process som kallas för förfrågningsprocess (eng. inquiry procedure). Denna process består av att en master-enhet dedikerar ett sökfönster för att kunna etablera anslutning mot slave-enheter. Inom detta sökfönster sänder master-enheten ut sin identitet vid ett antal olika tillfällen och inväntar därefter svar från närliggande enheter. De slave-enheter som är i ett söktillstånd (eng. Inquiry Scan State) öppnar periodvis upp ett sökfönster (eng. Inquiry Scan Window), vilket inträffar inom ett specificerat sökintervall (eng. Inquiry Scan Interval). De slave-enheter som finns inom master-enhetens täckningsområde och har ett öppet sökfönster kan därför ta emot master-enhetens utsända identitet. När detta inträffar sänder enheten tillbaka ett svar till master-enheten i form av ett paket innehållande slave-enhetens identitet, MAC-adress och klockinformation. För att minimera eventuella risker för kollision med andra potentiella slave-enheter skickar slave-enheten svaret efter ett slumpmässigt back-off-intervall, vars storlek beror på dess sökintervall. [19].
BLE (Bluetooth Low Energy), även kallat Bluetooth Smart och tidigare känt under namnet Wibree och ULP (Ultra Low Power), är den senaste utvecklingen av Bluetooth-tekniken. BLE baseras på Bluetooth-specifikationen 4.0, som bl.a. lämpar sig till energisnåla enheter som körs i långa perioder och vars främsta energikälla består av ett batteri eller andra lågenergikällor som exempelvis sol, vind eller vatten. Tillämpningsområdena för BLE anses därför främst vara inom området IoT (Internet of Things) [20].
BLE uppvisar skillnader mot tidigare Bluetooth-versioner inom bl.a. områdena dataöverföring och detektering. Beroende på vilka tekniska specifikationer som stöds av Bluetooth-enheten kan enheterna kategoriseras utifrån tre olika kategorier. Dessa specificerar kompabiliteten mellan tidigare versioner av Bluetooth, även kallad klassisk Bluetooth, och BLE. Den första kategorin behandlar kompabiliteten mellan två eller flera enheter av klassisk Bluetooth, vilket innebär att BLE inte stöds inom denna kategori och kommunikation mellan de olika versionerna kan därför inte genomföras. Den andra kategorin behandlar kompabiliteten mellan två eller flera BLE-enheter varpå klassisk Bluetooth ej stöds. Enheter som är utrustade med Bluetooth-specifikationen 4.0 och som både stödjer klassisk Bluetooth och BLE kallas för Dual Mode-enheter och utgör den tredje och sista kategorin. Dessa Mode-enheter är vanligtvis telefoner och datorer och går under namnet Bluetooth Smart Ready för konsumenter [21].
tar emot svar
Figur 1. Förfrågningsprocess.
sökintervall sökfönster Master sänder identitet
sänder svar tar emot identitet
sökfönster back-off-intervall
Slave
tid
Teknikens räckvidd specificeras av Bluetooth-enheternas effektklass, som utöver enheternas räckvidd även omfattar dess effektnivå vid sändning. Det finns tre olika effektklasser där klass 1 specificerar en räckvidd på ca 100 meter med en effektnivå på 100 mW, klass 2 specificerar en räckvidd på ca tio meter med en effektnivå på 2,5 mW och klass 3 specificerar en räckvidd på ca en meter med en effektnivå på 1 mW. Vanligtvis används klass 2 till både persondatorer och mobila enheter som t.ex. mobiltelefoner [18].
Enligt Irfan Oksar [22] blir Bluetooth-teknikens roll inom området inomhuspositionering allt större. Detta beror enligt Mainetti m.fl. [23] på teknikens vida utbredning bland enheter som exempelvis mobiltelefoner, vilket innebär att Bluetooth-baserade positioneringssystem inte kräver att användarna förses med ytterligare hårdvara än de mobiltelefoner som de redan bär med sig.
En typ av inomhuspositionering med Bluetooth är precis positionering. Denna typ av positionering utförs med hjälp av signalmätningar och positionsberäkningar, vilket ger en positionsbestämmelse med hög noggrannhet med upp till en meters precision [24]. Naya m.fl. [25] presenterar en annan typ av positionering. Positioneringen utgörs av närhetsdetektering och använder sig av förfrågningsprocessen mellan två Bluetooth-enheter utan behovet av att fastställa en fast piconet-anslutning mellan enheterna. På så sätt positioneras slave-enheten inom ett område med en noggrannhet på några meter. Utan en fast piconet-anslutning kan ett oändligt antal enheter detekteras utan att begränsas av maxtaket på antalet anslutna enheter i ett piconet.
2.3 Ljud
Inom fysiken definieras ljud som en vibrerande, oscillerande och förskjuten våg som fortplantar sig i ett medium, exempelvis luft. För att vågen ska bli hörbar för människan måste dess frekvens finnas inom det hörbara intervallet samt ha en effektnivå som är tillräckligt hög för att kunna stimulera hörselorganen. Ljud med en frekvens som överstiger respektive understiger intervallet för hörbart ljud refereras som ultrasoniskt respektive infrasoniskt ljud [26].
Den mikrofon som finns i mobiltelefoner använder ett frekvensband som omfattar det hörbara intervallet på 200 Hz – 20 kHz. Genom att utnyttja en mobiltelefons mikrofon i kombination med utplacerade ljudkällor kan ljud användas för positionering. Detta möjliggörs genom att ljudkällorna modulerar den utsända ljudsignalen med information om bl.a. dess identitet. Den utsända ljudsignalen demoduleras därefter av mobiltelefonen för att kunna urskilja information som skickats. Om ljudet från ljudkällan kombineras med en tillräckligt låg effektnivå kan kommunikationen mellan ljudkällan och mobiltelefonen inte uppfattas av människan [27]. Denna form av kommunikation, mellan ljudkälla och mobiltelefon, kan även ske i den motsatta riktningen genom att mobiltelefonen agerar sändare [28].
3
Relaterade arbeten
Avsnittet presenterar de relaterade arbeten som i huvudsak anses vara av betydelse för det område som rapporten omfattar, d.v.s. inomhuspositionering.
3.1 Byun m.fl. - S-Beacon: Next Generation BLE Beacon Solution
for Enhanced Personalization
År 2016 publicerade Byun m.fl. [29] en artikel som presenterade hur en mobiltelefon och en Bluetooth-fyr kan användas för närhetsdetektering med platsknutna funktioner. Artikeln utgår från kommunikationsprotokollet iBeacon som används för att approximera en mobiltelefons position utifrån bl.a. uppmätt RSSI-värdet från fyren. Utifrån en approximerad position kan mobiltelefonen ansluta till en butiks nätverk via exempelvis Wi-Fi för att därigenom ta del av de platsknutna funktioner som butiken har att erbjuda. Enligt artikeln ger iBeacon dock upphov till ett antal problem i form av hög energiförbrukning, brist på hanterbarhet samt låg noggrannhet. Dessa problem anser artiklen kunna lösas med hjälp av det egenutvecklade alternativet S-Beacon. Förutom att S-Beacon löser de problem som är knutna till iBeacon utökar S-Beacon även infrastrukturens kapacitet, vilket ökar möjligheterna till individanpassade tjänster. Istället för att fyren skickar ut datapaket som tas emot av mobiltelefonen skickar mobiltelefonen ut demografisk data som fyren tar emot och använder som grund till de förbättrade tjänsterna. Enligt artikeln utgör detta grunden till varför S-Beacon lämpar sig bättre än iBeacon inom ett antal olika områden som t.ex. butik, offentliga platser, hotell, sjukhus och hem samt inom området wearables.
3.2 Chawathe – Beacon Placement for Indoor Localization using
Bluetooth
År 2008 publicerade Sudarshan S. Chawathe [30] en artikel som presenterade en cellbaserad metod för placering av Bluetooth-fyrar i ett system för inomhuspositionering. Placeringen av dessa fyrar modelleras fram med hjälp av en hypergraf, vars hörn representerar intressanta platser i inomhusmiljön. De områden som utgör fyrarnas överlappande täckningsområden är de områden som användarna kan positioneras i. Metoden syftar till att välja ut de mest fördelaktiga positionerna för det antal Bluetooth-fyrar som systemet utnyttjar för att maximera antalet överlappande täckningsområden i inomhusmiljön. Detta görs med hjälp av en empirisk observation av Bluetooth-fyrarnas räckvidd. Andra orsaker som kan tänkas begränsa en Bluetooth-fyrs räckvidd, så som exempelvis förekomsten av hinder, anses kunna abstraheras. Därefter sker positioneringen genom att en användare med en mobil enhet är inom det område som bildas av flera olika Bluetooth-fyrar och dess överlappande täckningsområden. Detta utan beräkningar av enheternas distans eller vinkel till användaren.
3.3 Jiang m.fl. - Design and Evaluation of a Wireless
Magnetic-based Proximity Detection Platform for Indoor Applications
År 2012 publicerade Jiang m.fl. [31] en artikeln innehållande en strategi som empiriskt och systematiskt jämförde de zoner som skapats av olika trådlösa tekniker som Bluetooth, RFID och 802.15.4. Artikeln menar att de olika teknikerna har misslyckats inom områdena
gränsskärpa för en zon, känslighet mot interferens och genomträngningsförmåga, vilket kan påverka användarupplevelsen i samband med närhetsdetektering. Enligt artikeln delas en zongräns in i tre områden: svart, vit och grå. I de svarta respektive vita områdena detekteras användaren som innanför respektive utanför zonen. I det grå området sker däremot en sporadisk och oförutsägbar detektering av användaren. Av denna anledning är gränsskärpa och konsekvent avläsning av en zons gräns av största betydelse för användarupplevelsen. Utifrån detta presenterar artikeln en egen plattform kallad LiveSynergy som till skillnad från redan nämnda tekniker baseras på magnetisk induktion. Artikeln menar att plattformen ger en zon skarpa och konsekventa gränser som inte påverkas av mänskliga hinder. Därmed anses magnetisk induktion vara en teknik som är väl lämpad för närhetsdetektering.
3.4 Lujan m.fl. - Deeploc: Discreet Indoor People Location
Application
År 2011 presenterade Lujan m.fl. [32] ett passivt system för positionering och identifiering av mobiltelefoner i en zonindelad inomhusmiljö. Systemets fokus ligger på att samla in statistisk data över hur folk rör sig mellan olika zoner och inte på att tillhandahålla information om den egna positionen. Systemet utgörs av tre komponenter: mobiltelefon för identifiering, basenhet för positionering samt dator för övervakning. Mobiltelefonerna positioneras och identifieras genom att systemets basenheter periodvis sänder ut en förfrågan om identifiering via Bluetooth. Samtliga Bluetooth-aktiverade mobiltelefoner, som befinner sig inom en viss basenhets täckningsområde, besvarar förfrågan genom att sända tillbaka sin MAC-adress. Basenheterna sänder därefter information om mobiltelefonernas positionering och identifiering vidare i fasta intervall till systemets övervakningsdator via Wi-Fi. I övervakningsdatorn lagras mottagen informationen i en MySQL-databas. All hantering och presentation av positionerings- och identifieringsinformation sker därefter med hjälp av en Java-applikation. På detta sätt kan statistik föras och presenteras över hur en viss mobiltelefon har rört sig mellan olika zoner.
3.5 Mainetti m.fl. - A Survey on Indoor Positioning Systems
År 2014 presenterade Mainetti m.fl. [23] en undersökning över de vanligaste teknikerna för inomhuspositionering samt möjliga områden för fortsatt forskning inom området. Teknikerna som tas upp i artikeln utgörs bl.a. av Bluetooth, RFID, Wi-Fi och ultraljud som först och främst är lämpade för inomhuspositionering. Artikeln går ytligt igenom de olika teknikerna, hur de fungerar samt deras för- och nackdelar. Därutöver jämförs teknikerna även utifrån kriterier som täckning och noggrannhet. De olika teknikerna diskuteras utifrån verkliga scenarion som de kan tänkas komma att implementeras i. Fokus läggs även på inomhuspositionering och svårigheterna inom detta område. Vidare för artikeln diskussioner kring framtida utvecklingsmöjligheter för inomhuspositionering.
3.6 Yang m.fl. - An Area Zoning Based WLAN Location System
År 2009 presenterade Yang m.fl. [16] ett system för inomhuspositionering av mobiltelefoner med hjälp accesspunkter i ett Wi-Fi-nätverk. Genom att låta mobiltelefonen mäta signalstyrkan från befintliga accesspunkter i inomhusmiljön kan mobiltelefonen knytas till en specifik zon och utifrån denna zon kan mobiltelefonens position beräknas. Systemet bygger på antagandet
att den enskilde accesspunktens signaldämpning i förhållande till avståndet är identiskt för samtliga accesspunkter, vilket innebär att det teoretiskt sett går att beräkna avståndet från en accesspunkt utifrån uppmätt signalstyrka. För att systemet ska fungera krävs det en inledande fas där inomhusmiljön delas in i ett antal zoner och accesspunkternas signalstyrka mäts. Detta leder till att varje zon får ett uppmätt max- respektive minimivärde för signalstyrkan från varje enskild accesspunkt. Under användning av systemet mäter en mobiltelefon accesspunkternas signalstyrka i realtid och utifrån kartläggningen av zonernas max- respektive minimivärde för signalstyrkan är det möjligt att avgöra i vilken zon mobiltelefonen finns. Därefter kan mobiltelefonens position beräknas genom att kombinera zontillhörigheten och uppmätt signalstyrka från de olika accesspunkterna med modellen för avståndberäkning. Utifrån experimentella tester uppvisar systemet en tillförlitlighet på mer än 75 procent med en en felmarginal på upp till ca 3,5 meter.
4
Metod
Avsnittet presenterar de metoder som rapporten baseras på, vilket omfattar övergripande metod, metod för framtagning av en prioriterad kravspecifikation samt metod för utveckling av en prototyp och dess implementation.
4.1 Övergripande metod
Omgivningen formas av de människor och organisationer som verkar inom den och utifrån omgivningens behov uppstår problemområden. Dessa problemområden löses vanligtvis med hjälp av de människor och den kunskap som redan existerar inom omgivningens ramar. Den roll som forskningen syftar till är att lyfta ut de specifika problemen från omgivningen och behandla dessa utifrån ett större kunskapsperspektiv. På detta sätt kan forskningen både generera lösningar på omgivningens specifika problem och bidra till att öka den generella kunskapsbasen (se Figur 2) [33].
Utifrån denna forskningsmetod avser rapporten att identifiera problemområdet och det specifika problem som uppkommit inom Malmö högskola med hjälp av en kravspecifikation. Genom att
kombinera kravspecifikationen med inhämtad kunskap via en litteraturstudie avser rapportens resultat att bidra med ökad kunskap till den generella kunskapsbasen samt att lösa Malmö högskolas specifika problem.
4.2 Kravspecifikation
En kravspecifikation används för att tydligt specificera vilka krav som ställs på ett system. Kraven klassificeras antingen som funktionella krav, vilka beskriver vad ett system ska göra, eller som icke funktionella krav, vilka beskriver de egenskaper som ett system ska ha. Genom att identifiera intressenterna till ett system kan kunskap fås om vilka behov som systemet behöver tillgodose. Med den informationen kan systemets mest övergripande mål också bestämmas. Dessa mål beskriver bl.a. de problem som systemet ska lösa, systemets intressenter samt systemets övergripande krav [34].
Genom att använda flera olika insamlingstekniker, med varierande användningsområden, ökar möjligheterna att få fram en komplett bild av kraven. I ett större system är det vanligtvis inte möjligt att samla in samtliga krav vid ett enskilt tillfälle varav ett iterativt förhållningssätt kan vara nödvändigt. Är systemet däremot litet kan antalet insamlingstekniker begränsas. Kravinsamlingen inleds med att identifiera systemets intressenter, dess funktionella krav och annan övergripande information om systemets funktionalitet. Den övergripande informationen tolkas och översätts därefter till systemets icke funktionella krav. Efter kravinsamlingen behöver kraven prioriteras [34]. Detta kan göras med hjälp av en prioriteringsmetod för att ge ökad förståelse och bättre hantering av de framtagna kraven. En metod för prioritering är MoSCoW-metoden [35] som fördelar kraven utifrån fyra fördefinierade prioriteringsgrupper där varje krav inom en viss grupp anses ha samma prioritet. Processen med att fördela kraven
Omgivning Generell kunskapsbas Forskning problem kunskap lösning bidrag
sker i samråd med kravställarna och baseras på följande prioriteringsgrupper med början på gruppen med högst prioritet:
• Must have – representerar den grupp som utgör de mest grundläggande kraven på ett system.
• Should have – representerar den grupp som utgör de viktiga men inte avgörande kraven för ett system.
• Could have – representerar den grupp som utgör de önskvärda men inte viktiga kraven för ett system.
• Won’t have – representerar den grupp som utgör de krav som klargör systemets omfång och framtida utvecklingsområden.
4.3 Utvecklingsprocess
Enligt Pahl m.fl. [36] kan en teknisk artefakt beskrivas som ett dynamiskt system bestående av ett antal separata delar som utifrån dess individuella egenskaper är sammankopplade med varandra för att tillsammans skapa en helhet. Utifrån detta perspektiv anses det fullt möjligt att tillämpa systemteori i samband med utvecklingen av en teknisk artefakt. Detta innebär att utvecklingsprocessen för en teknisk artefakt bäst hanteras på ett systematiskt och strukturerat tillvägagångssätt med fasta steg innehållande analys och syntes. Det första steget i en utvecklingsprocess av detta slag är att identifiera problemområdet d.v.s. någon form av problemanalys. Steg två i processen är att generera en problemformulering och därigenom även konstruera en målbild. I steg tre genereras ett antal olika lösningsförslag baserade på problemområdets ramar, problemformuleringen samt målbilden. Därefter analyseras lösningsförslagen i steg fyra för att i steg fem kunna utvärderas baserat på problemformulering och målbild. Resultatet från utvärderingen resulterar därefter i ett beslut som slutligen implementeras i steg sju. I enlighet med Figur 3 genomförs utvecklingsprocessen inte alltid sekventiellt utan ett iterativt tillvägagångssätt är oftast nödvändigt.
Det problemområde och den problemformulering som är kopplad
till rapportens utvecklingsprocess är baserad på framtagen kravspecifikation, vilken presenteras i resultatavsnitt 5.1. I resultatavsnitt 5.2 presenteras därefter ett antal möjliga lösningsförslag, vilka analyseras och utvärderas för att leda fram till ett beslut avseende prototyp för inomhuspositionering. Implementationen presenteras slutligen i resultatavsnitt 5.3 och visar på ett proof-of-concept avseende prototypen samt hur detta kan kombineras med applikationsspecifika och platsknutna funktioner.
Problemområde Problemformulering Lösningsförslag Analys Beslut Implementation Utvärdering Figur 3. Utvecklingsprocess.
5
Resultat och analys
Avsnittet presenterar det resultat som följer av utvecklingsprocessen enligt metodavsnitt 4.3. Detta inkluderar identifiering av problemområde och problemformulering enligt metoden för kravspecifikation samt framtagning av lösningsförslag och beslut utifrån litteraturstudier. Slutligen leder detta fram till en implementation som proof-of-concept.
5.1 Kravspecifikation
Utifrån genomförda intervjuer och enkäter, riktade till lärare på Malmö högskola, identifieras ett antal krav som prioriteras enligt MoSCoW-metoden (se Appendix A för detaljerad redovisning). De krav som bedöms utgöra systemets grundläggande krav, d.v.s. de krav som anses utgöra grunden för implementationen, är placerade i prioriteringsgruppen Must have, vilket innefattar följande krav:
• Systemet ska automatiskt kunna identifiera och positionera en lärare utifrån förutbestämda zoner med hjälp av sin mobiltelefon.
• Systemet ska kunna presentera information om en lärares position utifrån förutbestämda zoner.
• Systemet ska möjliggöra för en lärare att ange sin tillgänglighet / status.
• Systemet ska kunna presentera information om en lärares tillgänglighet / status. • Systemet ska göra en lärare uppmärksam på när någon önskar besöka honom/henne i
den zon som läraren själv befinner sig i.
Utöver de krav som placeras i prioriteringsgruppen Must have återfinns krav i kravspecifikationen som bedöms vara viktiga men inte avgörande för systemet, d.v.s. de krav som anses vara viktiga men som inte utgör grunden för implementationen. Dessa krav placeras i prioriteringsgruppen Should have, vilket innefattar följande krav:
• Systemet ska möjliggöra för en lärare att stänga av / sätta på positioneringen av honom/henne.
• Systemet ska möjliggöra för en lärare att manuellt registrera hans / hennes position utifrån förutbestämda zoner.
• Systemet får inte kräva att användaren stänger av funktioner i mobiltelefonen. • Systemet ska fungera även utan en mobiltelefon.
• Systemet ska identifiera en lärare genom inloggning.
Resterande krav i kravspecifikationen bedöms antingen som önskvärda men inte viktiga eller som områden för framtida utvecklingsarbete, vilket placerar dem i prioriteringsgruppen Could
have respektive Won’t have.
Rapporten fokuserar i huvudsak på kraven i prioriteringsgrupperna Must have och Should have, vilka även ligger till grund för den implementation som är kopplad till Malmö högskola. De krav som återfinns i prioriteringsgrupperna Could have och Won’t have är dock inte föremål för vidare behandling i rapporten eller dess implementation.
5.2 Lösningsförslag och prototyp
Enligt kravspecifikationen ska positionsbestämning ske med hjälp av mobiltelefoner, vilka förutsätts vara individuellt kopplade till de personer som ska positionsbestämmas. De lösningsförslag som identifieras baseras därmed på denna förutsättning och samtliga lösningsförslag utgår från ställningstaganden inom de områden som presenteras i teoriavsnitt 2.1:
• Kategori – bestämmer hur mobiltelefonens position presenteras. • Arkitektur – bestämmer mobiltelefonens roll.
• Strategi – bestämmer hur mobiltelefonens position beräknas. • Teknik – bestämmer hur mobiltelefonen detekteras och identifieras.
Inom respektive område finns ett antal olika lösningsalternativ att ta ställning till (se tabell 1). För att få ett fungerande lösningsförslag krävs ett ställningstagande inom varje område, vilket innebär att det totalt sett finns 72 möjliga lösningsförslag.
Kategori Arkitektur Strategi Teknik
fysisk aktiv närhetsdetektering Bluetooth
symbolisk passiv triangulering Wi-Fi
absolut platsanalys ljud
relativ
Tabell 1. Lösningsalternativ.
Mot bakgrund av kravspecifikationen faller dock en del lösningsförslag bort direkt eftersom vissa lösningsalternativ inom områdena inte är att betrakta som relevanta (se resultatavsnitt 5.2.1 samt 5.2.3). Denna reducering av lösningsalternativ sker under analysen och de lösningsalternativ som är att betrakta som irrelevanta är därmed inte föremål för fortsatt utvärdering. I syfte att utvärdera och jämföra kvarvarande lösningsalternativ inom ett visst område används prestandakriterierna som presenterades i teoriavsnitt 2.1:
• Noggrannhet • Responsivitet • Täckningsområde • Anpassningsförmåga • Skalbarhet
• Kostnad och komplexitet
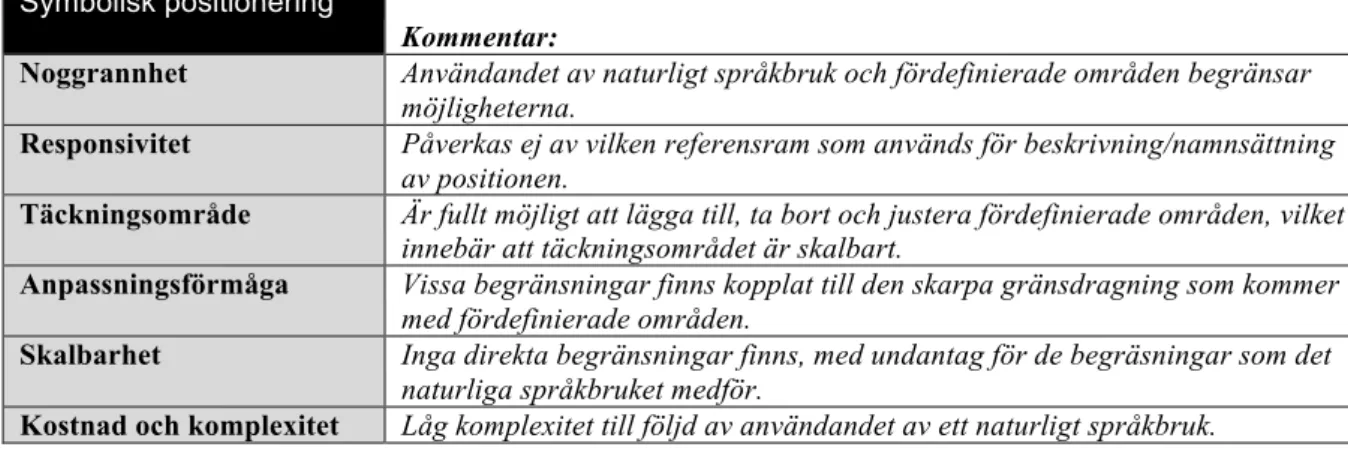
5.2.1 Analys och utvärdering inom området kategori
Med utgångspunkt i kravspecifikationen visar en analys inom området kategori att systemet avser att positionera mobiltelefoner utifrån ett antal förutbestämda zoner, namnsatta med hjälp av naturligt språkbruk. Detta innebär att samtliga lösningsalternativ, med undantag för symbolisk positionering, väljs bort inom området då de ger en mer detaljerad positionsangivelse än vad som efterfrågas. Symbolisk positionering är därmed det enda lösningsalternativet inom området som är föremål för utvärdering, vilket innebär att utvärderingen inte har för avsikt att
ligga till grund för ett beslut utan enbart presentera vad lösningsalternativet innebär för prototypen. Lösningsalternativet utvärderas enligt följande:
Symbolisk positionering
Kommentar:
Noggrannhet Användandet av naturligt språkbruk och fördefinierade områden begränsar möjligheterna.
Responsivitet Påverkas ej av vilken referensram som används för beskrivning/namnsättning av positionen.
Täckningsområde Är fullt möjligt att lägga till, ta bort och justera fördefinierade områden, vilket innebär att täckningsområdet är skalbart.
Anpassningsförmåga Vissa begränsningar finns kopplat till den skarpa gränsdragning som kommer med fördefinierade områden.
Skalbarhet Inga direkta begränsningar finns, med undantag för de begräsningar som det naturliga språkbruket medför.
Kostnad och komplexitet Låg komplexitet till följd av användandet av ett naturligt språkbruk.
Tabell 2. Utvärdering av symbolisk positionering.
5.2.2 Analys och utvärdering inom området arkitektur
Med utgångspunkt i kravspecifikationen visar en analys inom området arkitektur att det inte finns någon begränsning i valet av lösningsalternativ. Detta innebär att såväl en aktiv som en passiv arkitektur är möjliga att använda. Utvärderingen av dessa båda lösningsalternativ avser därmed att leda fram till ett beslut genom att presentera vad de olika lösningsalternativen innebär för prototypen. Lösningsalternativen utvärderas enligt följande (grön markering indikerar de skillnader som finns mellan lösningsalternativen):
Aktiv arkitektur
Kommentar:
Noggrannhet Påverkas ej av var i systemet positionsberäkningarna görs.
Responsivitet Kräver ingen intelligent centralenhet utan varje objekt beräknar sin egen position.
Täckningsområde Påverkas ej av var i systemet positionsberäkningarna görs.
Anpassningsförmåga Påverkas ej av var i systemet positionsberäkningarna görs.
Skalbarhet Antalet positionerade objekt påverkar inte prestandan. Ett utökat täckningsområde kräver enbart implementering av enklare sändare.
Kostnad och komplexitet Avancerad mjukvara krävs i samtliga positionerade objekt, vilka även belastas med avseende på bl.a. processorkraft och energiåtgång. Begränsningar finns avseende bl.a. vikt och storlek p.g.a. krav på mobilitet.
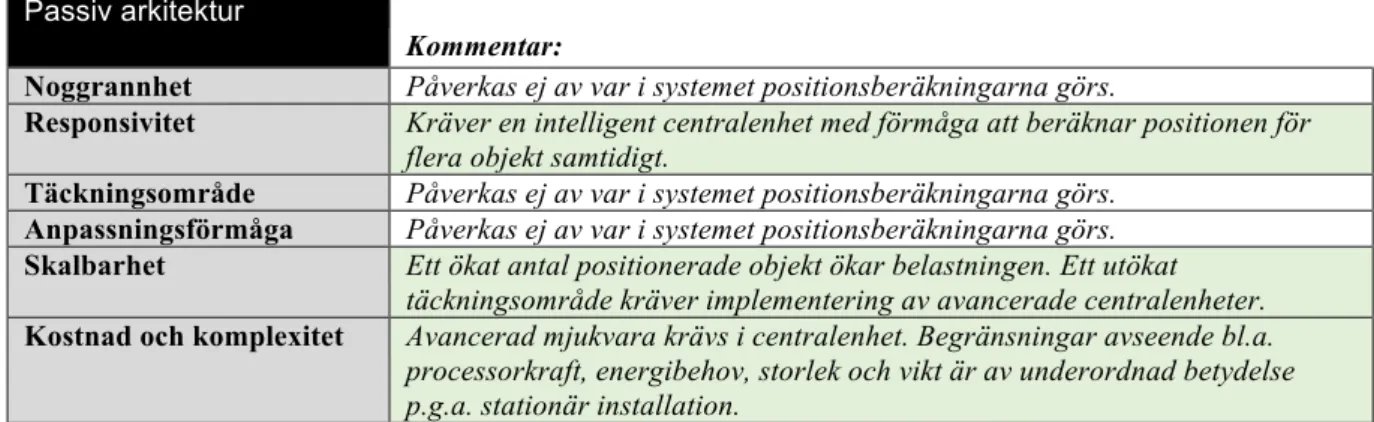
Passiv arkitektur
Kommentar:
Noggrannhet Påverkas ej av var i systemet positionsberäkningarna görs.
Responsivitet Kräver en intelligent centralenhet med förmåga att beräknar positionen för flera objekt samtidigt.
Täckningsområde Påverkas ej av var i systemet positionsberäkningarna görs.
Anpassningsförmåga Påverkas ej av var i systemet positionsberäkningarna görs.
Skalbarhet Ett ökat antal positionerade objekt ökar belastningen. Ett utökat täckningsområde kräver implementering av avancerade centralenheter.
Kostnad och komplexitet Avancerad mjukvara krävs i centralenhet. Begränsningar avseende bl.a. processorkraft, energibehov, storlek och vikt är av underordnad betydelse p.g.a. stationär installation.
Tabell 4. Utvärdering av passiv arkitektur.
Det faktum att positionsbestämmelserna ska ske med hjälp av mobiltelefoner innebär att de positionerade objekten har god förmåga att hantera avancerad mjukvara och därmed beräkna sin egna position, vilket ligger i linje med den aktiva arkitekturen och dess utvärdering av prestandakriteriet responsivitet. I enlighet med utvärderingen av prestandardkriteriet skalbarhet uppvisar den aktiva arkitekturen dessutom fördelar kopplat till antalet positionerade objekt samt enklare och billigare möjligheter att utöka täckningsområdet genom enkla sändare (i motsats till den passiva arkitekturen). Även om utvärderingen av prestandardkriteriet kostnad och
komplexitet visar på fördelar för den passiva arkitekturen (kopplat till dess stationära
installation) kringgås inte det faktum att mobiltelefoner ska användas enligt kravspecifikationen. Därmed faller det också naturligt att utnyttja denna befintliga hårdvara i så stor utsträckning som möjligt. En sammantagen bedömning, med hänsyn till kravspecifikationen och det faktum att positioneringen ska ske med hjälp av mobiltelefoner, leder fram till ett beslut som innebär att en aktiv arkitektur är att föredra.
5.2.3 Analys och utvärdering inom området strategi
Med utgångspunkt i kravspecifikationen visar en analys inom området strategi att det inte finns några krav på exakt positionering utan systemet avser att detektera en närvaro. Detta innebär att närhetsdetektering är det givna lösningsalternativet inom området. Mot bakgrund av de svårigheter som vanligtvis är förknippade med inomhuspositionering med hjälp av elektromagnetisk strålning eller ljud finns dock ett behov av att även utvärdera platsanalys som ett lösningsalternativ inom området. Utvärderingen av dessa båda lösningsalternativ avser därmed att leda fram till ett beslut genom att presentera vad de olika lösningsalternativen innebär för prototypen. Lösningsalternativen utvärderas enligt följande (grön markering indikerar de skillnader som finns mellan lösningsalternativen):
Närhetsdetektering
Kommentar:
Noggrannhet Begränsas av storleken på område samt det faktum att detekteringen enbart ger resultatet ”i området” eller ”inte i området”.
Responsivitet Kräver ingen beräkning utan enbart avkänning (detektering) från en sändare.
Täckningsområde Är fullt möjligt att lägga till, ta bort och justera områden, vilket innebär att täckningsområdet är skalbart.
Anpassningsförmåga Kräver viss kalibrering vid större förändringar.
Skalbarhet Inga direkta hinder.
Kostnad och komplexitet Kräver ingen omfattande kalibrering eller avancerad mjukvara.
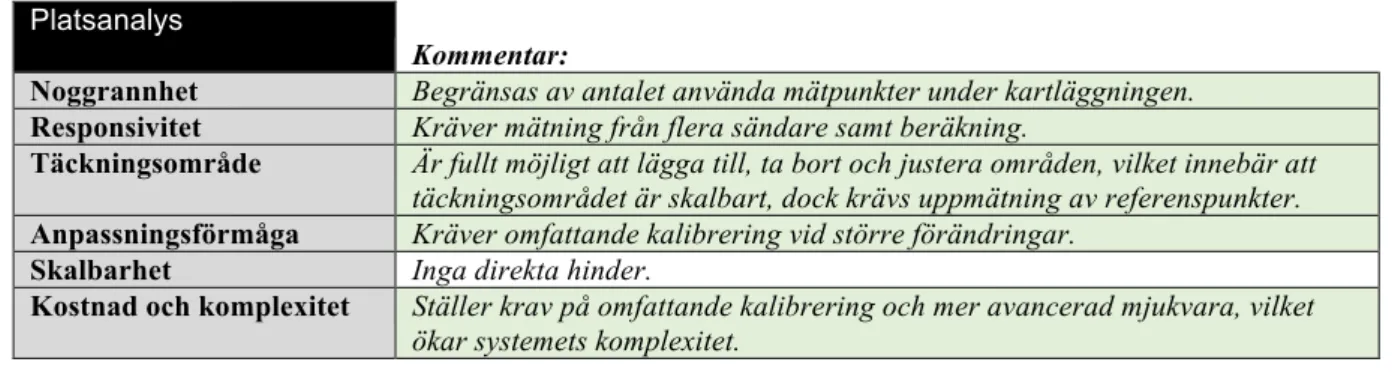
Platsanalys
Kommentar:
Noggrannhet Begränsas av antalet använda mätpunkter under kartläggningen.
Responsivitet Kräver mätning från flera sändare samt beräkning.
Täckningsområde Är fullt möjligt att lägga till, ta bort och justera områden, vilket innebär att täckningsområdet är skalbart, dock krävs uppmätning av referenspunkter.
Anpassningsförmåga Kräver omfattande kalibrering vid större förändringar.
Skalbarhet Inga direkta hinder.
Kostnad och komplexitet Ställer krav på omfattande kalibrering och mer avancerad mjukvara, vilket ökar systemets komplexitet.
Tabell 6. Utvärdering av platsanalys.
Enligt kravspecifikationen ska positioneringen ske utifrån förutbestämda zoner, vilket innebär att närvarodetekteringens noggrannhet är fullt tillräcklig. Vidare pekar utvärderingen på fördelar med närhetsdetektering avseende prestandakriterierna responsivitet, täckningsområde,
anpassningsförmåga samt kostnad och komplexitet. Detta mot bakgrund av att
närhetsdetektering är enkel att upprätta då den enbart kräver en sändare samt att den inte kräver någon omfattande kalibrering eller avancerad mjukvara för beräkningar. En sammantagen bedömning innebär därför att närhetsdetektering är att föredra.
För att att öka positioneringens förmåga att övervinna de svårigheter som vanligtvis är förknippade med inomhuspositionering med hjälp av elektromagnetisk strålning eller ljud är beslutet dock att låta prototypen kombinera närhetsdetektering med platsanalysens kartläggning utifrån referenspunkter. På detta sätt ökar möjligheterna att hitta optimal placering av sändarna och därigenom utforma zonerna utifrån inomhusmiljön.
5.2.4 Analys och utvärdering inom området teknik
Med utgångspunkt i kravspecifikationen visar en analys inom området teknik att det inte finns några begränsningar i valet av lösningsalternativ. Detta innebär att Bluetooth, Wi-Fi och ljud är alla att betrakta som relevanta lösningsalternativ. Utvärderingen av dessa lösningsalternativ avser därmed att leda fram till ett beslut genom att presentera vad de olika lösningsalternativen innebär för prototypen. Lösningsalternativen utvärderas enligt följande (grön markering indikerar de skillnader som finns mellan lösningsalternativen):
Bluetooth
Kommentar:
Noggrannhet Meter-nivå (över en meter).
Responsivitet Har försumbar påverkan.
Täckningsområde Är fullt möjligt att lägga till, ta bort och justera områden, vilket innebär att täckningsområdet är skalbart.
Anpassningsförmåga Har viss känslighet för förändringar i inomhusmiljö. Val av effektklass möjliggör förändring av täckningsförmågan.
Skalbarhet Inga direkta hinder. Ett ökat täckningsområde kräver dock fler fyrar.
Kostnad och komplexitet Är en standardiserad kommunikationsteknik, vilket underlättar vid implementation.
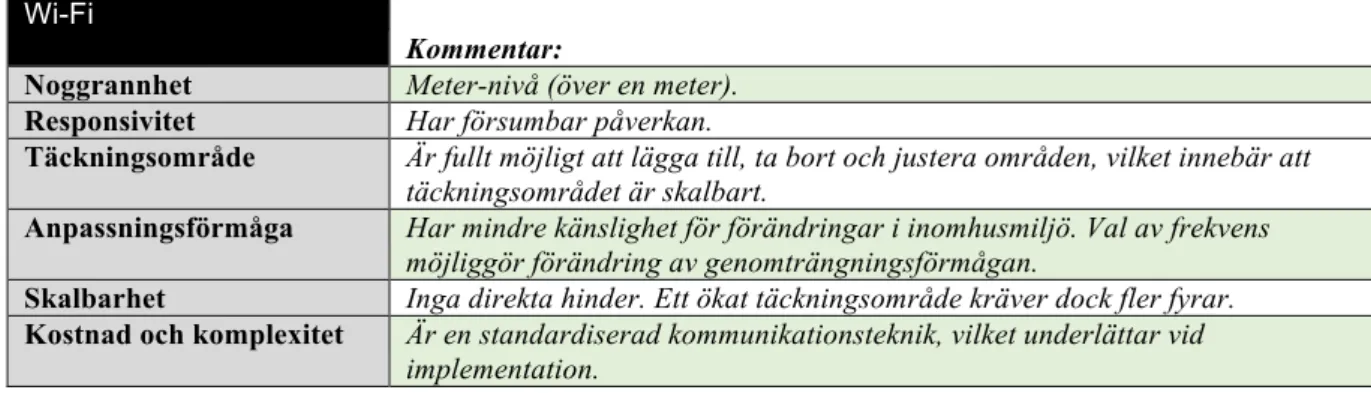
Wi-Fi
Kommentar:
Noggrannhet Meter-nivå (över en meter).
Responsivitet Har försumbar påverkan.
Täckningsområde Är fullt möjligt att lägga till, ta bort och justera områden, vilket innebär att täckningsområdet är skalbart.
Anpassningsförmåga Har mindre känslighet för förändringar i inomhusmiljö. Val av frekvens möjliggör förändring av genomträngningsförmågan.
Skalbarhet Inga direkta hinder. Ett ökat täckningsområde kräver dock fler fyrar.
Kostnad och komplexitet Är en standardiserad kommunikationsteknik, vilket underlättar vid implementation.
Tabell 8. Utvärdering av Wi-Fi.
Ljud
Kommentar:
Noggrannhet Centimeter-nivå (under en meter).
Responsivitet Har försumbar påverkan.
Täckningsområde Är fullt möjligt att lägga till, ta bort och justera områden, vilket innebär att täckningsområdet är skalbart.
Anpassningsförmåga Är väldigt känsligt för förändringar i inomhusmiljön p.g.a. låg genomträngningsförmåga.
Skalbarhet Inga direkta hinder. Ett ökat täckningsområde kräver dock fler fyrar.
Kostnad och komplexitet Saknar standard för kommunikation, vilket försvårar vid implementation.
Tabell 9. Utvärdering av ljud.
Utvärderingen pekar på fördelar med Wi-Fi avseende prestandakriteriet anpassningsförmåga. Detta p.g.a. teknikens högre genomträngningsförmåga och mindre känslighet för förändringar i inomhusmiljön. Vidare pekar utvärderingen på fördelar med ljud avseende prestandakriteriet
noggrannhet. Den höga nivå av noggrannhet (centimeter-nivå) som ljud erbjuder är dock inte
nödvändig sett till kravspecifikationen och dess krav på positionering utifrån förutbestämda zoner. För detta ändamål är en noggrannhet på meter-nivå fullt tillräckligt. Både Bluetooth och Wi-Fi har dessutom en gemensam fördel över ljud avseende prestandakriteriet kostnad och
komplexitet. Detta med anledning av att ljud saknar en färdig standard för kommunikation,
vilket både Bluetooth och Wi-Fi har. En sammantagen bedömning, med hänsyn till kravspecifikationen, innebär att ljud faller bort då det inte längre anses ha någon fördel över Bluetooth och Wi-Fi. Den fördel som Wi-Fi har över Bluetooth avser prestandakriteriet
anpassningsförmåga. En hög anpassningsförmåga, i betydelsen hög förmåga att täcka av ett så
stort område som möjligt, behöver dock inte enbart betraktas som positivt i samband med inomhuspositionering. I syfte att anpassa och forma en zon för närhetsdetektering kan Bluetooth-teknikens svaghet avseende prestandakriteriet anpassningsförmåga ses som en styrka. Genom ökad möjlighet att begränsa täckningsområdet kan en mer detaljerad och formbar zongräns skapas för att därigenom upprätta en zon med ett täckningsområde som överensstämmer väl med det fördefinierade området i inomhusmiljön. Det beslut som tas inom området teknik innebär därför att Bluetooth är att föredra.
5.2.5 Beslut
Utifrån genomförd analys och utvärdering av lösningsalternativen är ett beslut taget enligt följande:
Kategori Arkitektur Strategi Teknik
symbolisk aktiv närhetsdetektering
(+ platsanalys) Bluetooth
Tabell 10. Beslut av lösningsalternativ.
Samtliga beslut från resultatavsnitt 5.2.1-5.2.4 har lett fram till ett koncept för inomhuspositionering (se Figur 4). Konceptet utgår från symbolisk positionering med en aktiv arkitektur, vilket innebär att positioneringen anges utifrån fördefinierade zoner och att positioneringen knyts till mobiltelefoner som själv beräknar positionen. Strategin bakom beräkningen av position utgår från närhetsdetektering, med viss komplettering via platsanalys, vilket innebär att mobiltelefonerna enbart beräknar positionen binärt i förhållande till respektive zon (”i zon” eller ”inte i zon”) och att zonernas gränser fastställs med hjälp av inledande kartläggning utifrån specificerade referenspunkter. Den teknik som används för att genomföra detektering och identifiering i zonerna är Bluetooth, vilket innebär att identiteten från passiva Bluetooth-fyrar tas emot av aktiva mobiltelefoner i zonen.
Framtaget koncept syftar till att beskriva hur en prototyp för inomhuspositionering kan konstrueras. Utifrån prototypen utgörs varje zon av ett fördefinierat område i inomhusmiljön, där varje zons täckningsområde är fullt möjlig att justera genom att placera ut fler eller färre Bluetooth-fyrar. Genom att ge samtliga Bluetooth-fyrar samma identitet ges mobiltelefonerna möjlighet att bli medvetna om vilka Bluetooth-signaler som är av betydelse. Vilken zon en viss Bluetooth-fyr tillhör specificeras med hjälp av dess MAC-adress. I syfte att skapa överensstämmelse mellan inomhusmiljöns fördefinierade område och zonens täckningsområde genomförs kalibrering utifrån ett antal referenspunkter, baserat på Bluetooth-fyrarnas RSSI-värde. På detta sätt identifieras optimal placering av Bluetooth-fyrarna och eventuellt gränsvärde för RSSI.
5.3 Implementation
Implementationen avser att visa på ett proof-of-concept genom att beskriva hur framtagen prototyp och dess koncept för inomhuspositionering kan tillämpas i det specifika fall som rapporten avser, d.v.s. för positionering av lärare på Malmö högskola. Utifrån framtagen kravspecifikation omfattar implementationen även applikationsspecifika och platsknutna funktioner, främst i form av ett system för besökshantering. Implementeringen sker i en inomhusmiljö som omfattar en del av det kontorsområde, även kallat hemvist, som tillhör
zon Bluetooth- fyr Bluetooth- fyr Mobiltelefon
fakulteten för Teknik och Samhälle på Malmö högskola. Hemvisten utgörs främst av öppna kontorslandskap kombinerat med mindre mötesrum och öppna samtals- och aktivitetsytor.
5.3.1 Positionering
Den del av systemet som utgör positionering via en mobilapplikation följer prototypen för inomhuspositionering. Punkt 1 i Figur 8 visar på hur en Bluetooth-fyr detekteras av en mobiltelefon och att mobiltelefonen, enligt punkt 2 i Figur 8, skickar information om bl.a. detekterad Bluetooth-fyr vidare till en molnbaserad databas. Mobiltelefonens kommunikation med databasen sker med hjälp av HTTP-anrop (Hypertext Transfer Protocol) via PHP-skript. På detta sätt kan information i databasen lagras, hämtas och kontrolleras.
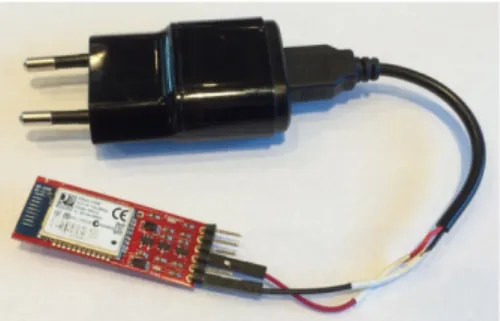
Den hårdvara som används till positioneringens implementation utgörs av Bluetooth-fyrar samt handhållna mobilenheter. Bluetooth-fyrarna baseras på Bluetooth-modem från SparkFun vid namn BlueSMiRF Silver, vilka utnyttjar Bluetooth-modulen RN-42 med effektklass 2. Bluetooth-modemen är återställda till fabriksinställningar, vilket innebär att de definieras som slave-enheter och är synliga genom bl.a. identitet och MAC-adress samt att deras sökintervall är 2,56 sekunder långt och deras sökfönster är 160 millisekunder långt. Vidare är Bluetooth-fyrarna strömsatta via vägguttag med
hjälp av en nätadapter med USB-anslutning (se Figur 5). De handhållna mobilenheterna utgörs av Samsung Galaxy Tab 3 med Android-version 4.4.2.
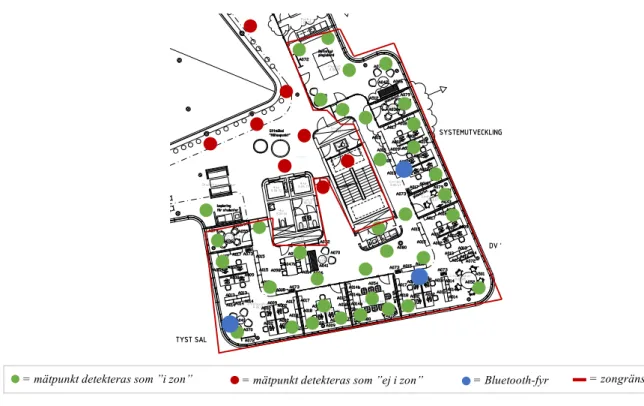
Mjukvarumässigt utgörs positioneringens implementation av två egenutvecklade Android-applikationer (se Appendix C). En av Android-applikationerna är enbart att betrakta som ett verktyg med avsikt att detektera Bluetooth-fyrarna och mäta RSSI-värden och den andra applikationen avser att användas av det implementerade systemet för positionering. Med hjälp av verktyget definieras zonernas täckningsområde genom optimal placering av Bluetooth-fyrarna samt identifiering av tröskelvärde för RSSI. Figur 7 redogör för resultatet av zonens täckningsområde vid ett tröskelvärde på -85 dBm, baserat på individuella mätningar av Bluetooth-fyrarna (se Appendix D för detaljerad redovisning).
Resultatet avseende zonens täckningsområde från de individuella mätningarna av Bluetooth-fyrarna (enligt Figur 6) bekräftas av mätningar som involverar samtliga Bluetooth-fyrar. Dessa mätningar bekräftar även att ett gränsvärde för RSSI på -85 dBm är fullt rimligt (se Appendix D för detaljerad redovisning). I enlighet med Figur 7 ger detta en zon med ett täckningsområde som överensstämmer väl med det fördefinierade området i inomhusmiljön.
Figur 6. Mätresultat av RSSI från Bluetooth-fyrar.
1 2 3 4 5 6 7 8 9 11 10 12 14 13 15 17 18 16 19 20 21 22 23 24 25 30 26 29 27 28 31 32 33 34 35 36 41 42 43 40 39 38 44 37 BT BT BT
= mätpunkt i zon = mätpunkt utanför zon
= detekterad mätpunkt (RSSI: > -80 dBm) = detekterad mätpunkt (RSSI: -80 dBm − -85 dBm) = Bluetooth-fyr = zongräns
5.3.2 Besökshantering
Den del av systemet som utgör besökshantering via en mobilapplikation baseras på Google Cloud Messaging. Punkt 4 i Figur 8 visar på hur en besöksförfrågan läggs med hjälp av ett HTTP-anrop till ett PHP-skript, vilket genererar en notifiering till den användare som besöket avser med hjälp av Google Cloud Messaging enligt punkt 5 i Figur 8. Besökshanteringen är helt en mjukvarumässig implementation som baseras på en egenutvecklad Android-applikation (se Appendix C). Denna installeras på en enhet (förslagsvis en surfplatta) med fast position i nära anslutning till den fördefinierade zonen (exempelvis vid dess in-/utgång).
5.3.3 Summerad systemvy
Implementationen består i sin helhet av den del av systemet som utgör inomhuspositioneringen och den del som utgör besökshanteringen. Genom att låta en applikation i mobiltelefonen hantera detektering av Bluetooth-fyrar samt kommunikation med en molnbaserad databas kan mobiltelefonens position, och därmed även lärarens position, förmedlas. Denna information kan dels synliggöras för studenter (eller andra lärare) och dels användas i ett system för besökshantering (avsett för studenter).
Figur 7. Zon-detektering.
= Bluetooth-fyr
I enlighet med Figur 8 utgörs systemet av tre olika delar: en del för positionering med hjälp av en mobilapplikation, en del för besökshantering via en mobilapplikation samt en del för hantering och delning av position via ett webbgränssnitt. Samtliga delar är sammankopplade via en gemensam server, innehållande en databas, ett antal skript i Hypertext Preprocessor (PHP-skript) för kommunikation med databasen samt ett webbgränssnitt (för mer information kring servern se Appendix B).
Exempel på situationer som systemet avser hantera är kopplat till såväl lärare som studenter på Malmö högskola. Enligt inledande avsnitt 1.1. önskar studenter kunna lokalisera tillgängliga lärare och initiera besök utan att störa andra lärare. Till grund för detta ligger positioneringen av lärare utifrån fördefinierade zoner på arbetsplatsen. Hur det implementerade systemet hanterar dessa situationer beskrivs i Tabell 11.
Figur 8. Systemvy. Databas PHP-skript SERVER www Webbgränssnitt Bluetooth- fyr 1. Bluetooth- detektering 2. HTTP-anrop 3. HTTP-anrop 4. HTTP-anrop Google Cloud Messaging 5. Notifiering Mobilapplikation för positionering LÄRARE Mobilapplikation för besök STUDENT Enhet med webbläsare LÄRARE & STUDENT