1
Examensarbete
15 högskolepoäng, grundnivå
Attityder till robotar i äldrevården: en komparativ studie
Attitudes towards robots in healthcare for elderly: a comparative study
Milena Vasovic
Examen: Kandidatexamen, 180hp
Handledare: Göran Hagert, Ivan Kruzela
Huvudämne: Data- och informationsvetenskap
Examinator: Bengt J. Nilsson
Program: Informationsarkitekt
3
Resumé
Denna uppsats handlar om medelålders personers inställningar till robotar i vården. Utmaningen är att fylla gapet som skapas mellan ökandet av äldre och minskandet av vårdgivare. Robotar i hemmet ska fungera som ett hjälpmedel för äldre personer där de ska kunna bo själva längre och även känna självständighet. Uppsatsen undersöker hur personer mellan 40 och 60 år ser på robotar i hemmet och om de hade kunnat tänka sig ha en sådan hemma när de blir äldre. En jämförelse görs mellan 20-40 åringar från en tidigare studie som genomfördes för ca 15 år sedan och dagens 40-60 åringar för att ge svar på frågan: Har synen på robotar och inställningen till dessa förändrats över tid sedan den sista undersökningen år 1998? Vilka mönster finns det – likheter och skillnader?
Abstract
This paper deals with the middle-aged attitude toward robots in healthcare. The challenge is to fill the gap created between increasing the elderly and the reduction of healthcare providers. Robots in the home to serve as an aid for the elderly where they can live independently for longer and even feel independence. The essay examines how people between 40 and 60 years looks at robots in the home and whether they are able to imagine having such at home as they get older. A comparison is made between 20-40 year olds and 40-60 year olds. How have perceptions of robots and attitude towards them changed over time since the last survey in 1998? What patterns are there – similarities and differences?
5
Innehåll
1. Inledning ... 6 1.1 Bakgrund ... 6 1.2 Frågeställning ... 6 1.3 Syfte ... 6 1.4 Metod ... 7 1.5 Rapportens struktur ... 7 2. Teori ... 8 2.1 Om robotar ... 8 2.2 Robotar i vården ... 10 2.2.1 Klassificering av robotar ... 10 2.2.2 Roboten PARO... 11 2.2.3 Roboten Giraff... 12 2.2.4 Roboten Bestic ... 132.2.5 Andra robotar i vården ... 13
3. Litteraturstudie - De gamlas attityder till robotar ... 15
Experiment ... 16
Resultat ... 18
3.1 Studie år 1998 ... 18
3.1.1 Resultat av studie ... 19
3.2 Faktorer som bidrar till acceptans ... 20
4. Empirisk studie ... 21
4.1 Introduktion ... 21
4.2 Frågorna ... 21
4.3 Resultat ... 22
5. Likheter och skillnader mellan studien år 1998 och 2012 ... 26
6. Diskussion ... 27
7. Slutsats ... 27
8. Referenser ... 29
6
1. Inledning
1.1 Bakgrund
Utmaningen med antalet gamla som ökar för varje år är att vi inom en snar framtid kommer att ha fler gamla än vårdgivare samt att vårdgivarna blir mindre till antalet [2]. Vårdgivare är i detta fall personal som jobbar med vård på individnivå [27]. Vissa av patienterna kommer att kräva mer vård vilket i sin tur kommer att kräva mer av personalen. Det ökade omhändertagandet kommer att belasta vårdgivarna och därför krävs en avlastande lösning. Robotar kan vara ett komplement till vårdgivarna vars hjälp samtidigt förbättrar livskvalitén för de äldre då de kan leva ett självständigt liv hemma under längre period oavsett kognitivt eller fysiskt handikapp. Eftersom robotteknik inom vård och omsorg är ett expansivt område är det högst relevant att noggrant undersöka de krav som ställs på robotarna för att täcka behoven.
1.2 Frågeställning
Uppsatsen undersöker medelålders generationen mellan 40-60 år och deras inställning till robotar inom vården och i hemmet. Undersökningen handlar om huruvida de hade kunnat tänka sig ha en robot i hemmet när de blir äldre eftersom platserna på vårdhemmen blir allt färre och vårdgivarna minskar. Tanken är att dessa vårdgivande robotar ska kunna ersätta människan i den utsträckning de kan. Robotarna ska hjälpa de äldre att bo självständigt i sitt eget hem och att klara sig bättre på egen hand.
Frågorna som uppsatsen kommer att fokusera på är följande:
- Vilka möjligheter och utmaningar finns det med robotteknik för människan i vardagen? - Hur ser medelålders personer, 40-60 åringar på robotar i hemmet?
1.3 Syfte
Undersökningen syftar till att få fram attityder och förväntningar på framtida robotar som så småningom kommer att finnas i hemmen och i äldrevården. Undersökningen syftar till att undersöka hur tänket har förändrats sedan år 1998 [3] då Zayera Khan, en student i datavetenskap från KTH gjorde sin undersökning på människor i åldern 20-40 och som idag är mellan 40-60 år gamla.
Idén till undersökningen kom från Susanne Frennert [23] som är forskare i kognitionsvetenskap vars intresseområden är teknik anpassad för äldre personer samt människa-robot interaktion. Svaren från undersökningen kommer att bidra till högre kunskapsmassa inom området.
7
1.4 Metod
Sökandet efter information och fakta relevant för uppsatsen har gjorts genom en litteraturstudie som omfattar tidigare studier om befintliga robotar inom vården. Uppsatsen har även jämförts med ett examensarbete från år 1998 där 20-40 åringars attityd till robotar undersöktes och jämfördes med dagens äldre som är mellan 40-60 år gamla. Denna metod valdes för att få fram ett mönster mellan år 1998 och år 2012 för att se om inställningen till robotar har förändrats sedan dess. På så sätt kan vi få fram om dagens människor som är i medelåldern kan tänka sig en robot i hemmet när de blir äldre och behöver assistans. Anledningen till att 40-60 åringar valdes att undersökas är just på grund av att de är äldre och närmare ett möjligt behov av robotar som hjälpmedel. Svaren från studien har bidragit till jämförelsen.
1.5 Rapportens struktur
I kapitel två, teoriavsnittet, ges en introduktion till området robotar och beskriver dessutom i korthet vilka robotar som används i vården. Nästa kapitel (kap. 3) ger en sammanfattning av min litteraturstudie som omfattar två artiklar och ett examensarbete från 1998. Kapitel fyra är själva studien där jämförelsen görs mellan de som 1998 var mellan 20-40 år och som idag, 2012 är cirka 40-60 år gamla.
8
2. Teori
2.1 Om robotar
Hur definieras en robot och vad är egentligen en robot?
En robot är en maskin som kan programmeras till att härma människors handlingar och beteende. Precis som människan samlar även roboten in information, utvärderar informationen och agerar därefter [29]. Ursprungligen presenterades ordet robot i samband med en pjäs skriven av den tjeckiske science-fiction författaren Karel Capek. Pjäsen hette ”R.U.R” och står för Rossum’s Universal Robots. Handlingen, som är skriven av Isaac Asimov, liknar den i filmen ”I, robot” där människoliknande robotar har eget tänkande och så småningom får de en egen vilja som skapar viljan att eliminera människan. Den tjeckiska pjäsen översattes till engelska året därpå (1922) i New York och därefter spred sig ordet vidare ut i världen. Pjäsens handling gav senare inspiration till ett flertal filmer såsom ”The Terminator”, ”I, robot” och ”Transformers” etc. [4, 28]
I rutan nedan (fig. 1) visar Rodney tre lagar i robotik som Isaac Asimov har skrivit där han tar upp vad roboten får och inte får göra i alla situationer [5].
Figur 1: Isaac Asimovs fyra grundlagar i robotik [5] Fakta
Den ryskamerikanske science-fiction författaren Isaac Asimov (1920-1954) har skrivit novellsamlingen Jag, Robot (1954). Här presenteras robotikens lagar. Lagarna var från början tre till antalet och lydde: 1. En robot får inte genom handling, eller underlåtelse att handla, orsaka att en människa skadas. 2. En robot måste lyda de order som ges av en människa, utom om detta skulle stå i strid med första lagen.
3. En robot måste skydda sig själv, utom om detta innebär brott mot första eller andra lagen. Senare tillkom en "nollte" övergripande lag, med prioritet före de första tre:
0. En robot får inte genom handling, eller underlåtelse att handla, orsaka att mänskligheten skadas.
En variant av robot är humanoid vars utseende har en mänsklig kroppsform. Humanoider har två ben och två armar som är fästa på en bål, även kallad torso, och ett huvud som är fäst vid bålen med en hals [6].
Redan på 1300-talet ska det ha funnits teorier om hjälpredor i form av robotar och illustrationer som visar hur en kvinnlig robot fyller och tömmer en tvättbalja. Denna illustration fanns med i boken vars titel är ”Boken som ger kunskap om sinnrika mekaniska apparater” och är skriven av en arabisk författare vid namn Al-Jazari [4]. Samma århundrade framställde uppfinnarna simpla robotar som kunde härma människans och djurs beteende. En av de enkla robotarna som framställdes var en tupp som gal varje gång klockan slog tolv och flaxade med vingarna. I Frankrike i staden Strasbourg kunde man se denna tupp som satt uppe på tornet i katedralen. Enligt Mark Elling Rosheim [7] var Leonardo da Vinci först med att rita en skiss på en humanoid år 1495 eller, som det kallades dåförtiden ”en mekanisk riddare som kunde röra armarna.”
9 Några intressanta årtal [8, 30, 31] i robotens historia som är värda att nämna är:
o 1941 var året då robotarna började styras med elektriska motorer och USA konstruerade den dansande roboten Elektra och hunden Sparko [30].
o 1954 kom prototypen av den första industriroboten Unimate i USA designad av George Devol som både var en uppfinnare och entreprenör. Denna robot togs inte i bruk förrän år 1961. Namnet kommer från Georges egna term kallad universal automation. George startade världens första robotföretag Unimation tillsammans med Joseph Engelberger som likaså var entreprenör och uppfinnare [30].
o John McCarthy, en amerikansk vetenskapsman, grundade begreppet AI, Artificiell intelligens år 1956. Det första forskningslabb för AI startades av John och några arbetskollegor år 1959, vilket är det ledande forskningslabbet än idag. Labbet är beläget vid universitetet Massachusetts Institute of Technology och samtidigt som forskningen utvecklades i USA spred det sig även till Japan och Storbritannien [30].
o 1967 kommer Sverige in i spelet och den första industriroboten installeras i en fabrik som ägs av Gränges Weda. Roboten kom från Unimation [30].
o 1968 kommer roboten Shakey i Kalifornien som både kan se och röra på sig [30].
o 1973 slår Japan igenom med världens första ”fullvuxna” humanoid. Den kan föra en enkel konversation, mäta avstånd och lyfta mindre saker [30].
o Under 90-talet började man massproducera robotar i Japan. Över 40 bolag påbörjade produktionen och hade storvinst i sikte [30].
o 1997 var det Mars som gällde. Där promenerade världens första självständiga och självgående robot [8].
o Honda lanserade Asimo humanoiden år 2000 [8, 31].
10
2.2 Robotar i vården
2.2.1 Klassificering av robotar
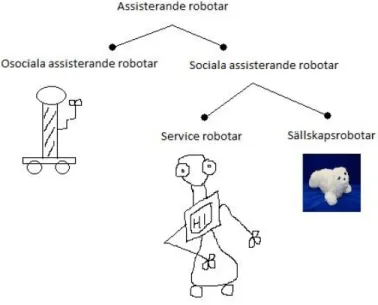
I detta kapitel kommer jag bland annat att presentera tre typiska robotar: PARO [9], Giraff [10] och Bestic [11]. PARO är en sällskapsrobot, Giraff en service robot och Bestic är ett osocialt hjälpmedel men som hjälper till vid fysiska svårigheter. Dessa tre representerar också klassificeringen av robotar (fig. 2) som hjälpmedel [2] och förklaras i texten nedan. Därefter presenteras ytterligare robotar som finns i vården.
En kommande ökning av den äldre befolkningen har inspirerat forskarna till innovationer inom intelligenta system. Dessa innovationer ska vara till hjälp både för de som dagligen jobbar inom äldrevården, men även för de äldre som väljer att bo själva oberoende av andra. Tidigare uppfinningar har inte tagit tillräcklig hänsyn till ålderns alla tecken, såsom exempelvis den nedsatta kognitiva förmågan. För att kunna utveckla hjälpmedel för äldre behövs det bättre förståelse för vad som egentligen krävs och hur vi kan anpassa dessa och samtidigt få de äldre att acceptera den nya tekniken. Ett samarbete mellan människor som jobbar inom vård och omsorg och systemutvecklare är nödvändigt för att skapa och bygga ett system som hjälper äldre i deras vardag [2]. Några exempel på tekniker som håller på att utvecklas är: intelligenta rullstolar, exoskelett, hjälpmedel för stöd vid gång och t.o.m. robotbutler. Det finns även påminnelse anordningar som hjälper kognitionen och robotdjur som agerar socialt.
Visionen är att systemen ska agera som ett intelligent hem (en miljö som övervakas av olika anordningar) som omfattar följande tre kategorier: stöd vid fysisk aktivitet, hjälp med t.ex. påminnelse vid kognitiv nedsatt funktion och socialt stöd.
Syftet med dessa är att stödja vid vardagliga aktiviteter och sysslor där roboten kan t.ex. hjälpa personen att komma upp ur sängen, bada, hjälpa till vid toalettbesök och städa vid behov. Förutom att hjälpa till vid sysslor ska dessa hjälpmedel, i form av robotar underlätta kommunikation genom att socialt interagera med användaren och på så vis framkalla socialt beteende hos användare som främjar välmående [2].
Assisterande robotar kan delas upp i två kategorier, se fig. 2: en där robotar agerar socialt och assisterar och en annan där de inte är sociala utan används enbart som hjälpmedel. Den första sociala kategorin kan sedan även den delas upp i två områden. Den första är service robotar som assisterar vid kognitiva och fysiska arbeten. Exempelvis kan man få en påminnelse när det är dags att ta medicin eller om personen behöver hjälp med att bära något eller eventuellt bara tända lampan i rummet kan roboten göra detta åt en. Den andra är sällskapsrobotar som kan föra en lätt konversation eller användas i rehabiliteringssyfte [2].
11 Figur 2. Klassificering av robothjälpmedel [2]
2.2.2 Roboten PARO
PARO, vars bild vi ser i fig. 3, är en sälliknande robot som skapades i syftet att kunna ersätta ett levande djur. Denna robot kan nämligen frambringa de känslor hos äldre (75+ år) precis som ett djur hade gjort. Sälen har visat sig ha positiva effekter och funktioner eftersom den svarar på olika stimuli såsom fonetiska och visuella och på samma sätt reagerar den tillbaka [25]. Därmed kan man med lätthet konstatera att PARO är lätthanterlig. PARO har utvecklats under 10 års tid av den japanske forskaren Takanori Shibata med hänsyn till djur som använts i rehabiliteringssyfte som visat goda resultat [12]. Dock finns det nackdelar med levande djur då de bland annat måste matas, rastas och risken för allergi finns också. Dessutom kan patienterna ibland oavsiktligt utsätta djuren för tuffa tag som de kanske inte tål [13]. Robotsälen PARO är lösningen på detta. Den är allergifri och behöver varken matas eller rastas [9].
12 En undersökning gjordes i sju länder där bland annat Sverige var med. De andra länderna var Italien, Japan, Korea, USA, England och Brunei. Efter en analys av svaren upptäckte man en skillnad i användandet av roboten; en var för terapi och den andra var husdjur. Skillnaderna stärktes ytterligare genom undersökningen där kulturella skillnader mellan Europa och Asien kom fram. Det gäller relationen mellan djur och människa. I Sverige, England och Italien räknar man med att robotsälen ska användas till terapi. I de asiatiska länderna, Korea och Japan, ser man PARO som ett husdjur. Däremot i USA och det lilla landet Brunei, som ligger i Malaysia, förväntar man sig att PARO ska uppfylla båda funktioner som husdjur och i rehabiliteringssyfte [14].
Det Danska Teknologiska Institutet (DTI) har försett olika institutioner med PARO ända sedan slutet på år 2008. Bland annat har sjukhus och barn med utvecklingssvårigheter använt sig utav denna robot och framförallt äldre med demens [14]. Institutet har även försett Sverige, Norge och Finland med denna robot sedan år 2010. Effekten av umgänge med djur har uppvisat ge hög positiv effekt [12].
Sedan i mitten av november 2011 finns PARO till försäljning i Sverige och den kostar så mycket som 66 250 kronor. Roboten har introducerats på samtliga boenden i Tierps kommun i Uppsala och är därmed den första kommunen som har fått äran att visa upp PARO för äldre med demens [15].
2.2.3 Roboten Giraff
I Sverige finns det flera verksamma robotar. Giraff Technologies i Västerås har utvecklat en robot vid namn Giraff som enligt företaget ska agera som en ”förlängning” av människan [16]. Tanken är att man ska kunna koppla upp sig på nätet och samtala med den äldre genom videosamtal samtidigt som man håller ett öga på miljön hemma hos den äldre när man har tid och möjlighet. På detta sätt kan både familj och vänner engagera sig i omhändertagandet av den äldre samtidigt som ansvaret delas mellan familj och vårdgivare. Stephen Von Rump som är VD för företaget är en av utvecklarna bakom roboten Giraff som insåg hur roboten kan gynna både vårdgivarna, vårdtagarna (de äldre) och deras familjer. En bild på roboten och Stephen finns i fig. 5.
Figur 5: Stephen Von Rump och Giraff
13 Giraff har även tilldelats ett pris för den mest lovande innovation år 2011 av EU-programmet Ambient Assisted Living (AAL) som ger ökad livskvalitet för äldre [16, 17].
2.2.4 Roboten Bestic
En svensk uppfinning är roboten Bestic som Sten Hemmingsson utformat eftersom han själv var i behov av ett hjälpmedel som kan hjälpa honom äta [18]. Tillsammans med ingenjören Ann-Louise Norén utvecklades Bestic. Ann-Louise skrev ett examensarbete på Chalmers år 2005 där hon gjorde en förstudie om detta hjälpmedel och dess behovsbild och potentiella marknad. Uppenbarligen fanns det ett behov eftersom sju år senare, 2012 finns roboten ute till försäljning och har levererats till flera länder däribland England, Danmark, Frankrike och Holland. Bestic fungerar som en extra arm där användaren självständigt kan äta med hjälp av roboten utan att bli matad av någon annan. Längst ut på denna arm sitter en sked som styrs av användaren genom en handikappsanpassad enhet. Utseendemässigt ser hjälpmedlet ut precis som en köksapparat då tanken är att den ska smälta in i hemmet [19, 26] (se fig. 6 och 7).
Figur 6: Sten Hemmingsson och Bestic Figur 7: Bestic
Forskarna vill även lägga till möjligheten för ögonstyrning där människor med större handikapp också ska kunna ta del av och utnyttja roboten [20].
2.2.5 Andra robotar i vården
Hjälpmedel i form av robotar är redan i testfasen och ute bland de äldre i hälsovården. För att kunna designa robotar där de uppfyller användarens krav och behov måste ålderns samtliga tecken tas till hänsyn. Trots det finns det robotar i olika kategorier som beroende på vilket behov och/eller krav man har kan anpassas till individen. Man talar förstås om olika robotar och inte en och samma som anpassas utefter behoven som användaren har [2].
14 Dessa behov kan man dela upp i kategorier som tidigare har nämnts i texten, vilka är: socialt stöd, fysisk hjälp samt övervakning av säkerhet och hälsa.
I den sistnämna kategorin hör roboten Pearl till [2]. Den övervakar nämligen hälsan. Pearl är ämnad till att påminna användaren att ta sin medicin, gå till doktorn och den kan även vägleda den äldre i hemmet eller på äldreboendet. Det är väldigt viktigt att roboten känner igen om den äldre har något tillstånd som den måste anpassa sig efter. Ett exempel på ett tillstånd kan vara nedsatt hörsel. Att känna igen de individuella skillnaderna är vad som får roboten att fungera och bli accepterad och mottagen på rätt sätt.
En annan robot är MOVAID som ger den äldre större självständighet genom att hjälpa till med hushållssysslor och utföra dessa. Även Care-O-bot hör till denna kategori och är väldigt behjälplig. Man kan stödja sig på den vid behov när man går eller säga åt den att hämta något om man inte klarar av det på egen hand [2].
Ri-man är en robot som är känd inom medicinvärlden. Han har fått en utmärkelse, år 2006, för bästa uppfinning inom medicin [2]. Roboten är känd för sina speciella egenskaper och funktioner. Upptäcka lukter och lokalisera ljud är något av det Ri-man kan göra. Den kan nämligen också lyfta upp en människa och bära den med hjälp av känslosensorer som den är täckt av. Sensorerna i sin tur skapar en balans som gör att Ri-man inte tappar människan.
Robotar som ger socialt stöd och med vilka man kan interagera på social nivå är the Hug och AIBO. AIBO är en hund vars närvaro skapar en känsla av minskad avskildhet och stärker kommunikationen mellan patienterna som har demens. The Hug agerar på motsvarande sätt fast fysiskt. Den kramande roboten, vars yttre lager är lättmottagligt för känsel genom kroppsligt/fysiskt tryck, skickar en kram till barnbarnet elektroniskt. För att barnbarnet ska känna av kramen måste den ha en likadan robot hemma som mottar denna signal från mor- eller farföräldern som sänder den [2].
Den första kommersiella mobila roboten som lanserades år 2005 var Mitsubishis Wakamaru. Roboten designades för att hjälpa till i hemmet med hjälp av en kommunikationsanläggning. I början såldes 100 stycken för cirka $14 500, vilket idag blir ca 103 000 svenska kronor [21]. Några av Wakamarus funktioner är att övervaka hemmet samt att reagera om användaren faller ur sin dagliga rutin där han/hon inte svarar eller har råkat illa ut. Roboten kan då skicka mail till dem det berör. Om någon däremot skulle skicka mail till den äldre kan roboten även läsa upp detta [2].
15
3. Litteraturstudie - De gamlas attityder till robotar
Materialet i detta kapitel bygger på två artiklar och ett examensarbete från KTH. Artiklarna skrevs år 2009 resp. 2010 där den ena är en empirisk studie [1] och den andra en litteraturstudie [2]. Examensarbetet från KTH handlar om attityden till intelligenta service robotar vars undersökning gjordes år 1998 av Zayera Khan [3].
Granskningen i första artikeln [1] är främst en litteraturstudie kring hur äldre personer mottar hälsofrämjande robotar. Några av robotarna som utvecklats har tagits emot på ett positivt sätt medan andra inte har lyckats skapa sig en marknad eller visat sig uppfylla de behov och krav som ställs. I föregående stycke togs det upp vilka de befintliga robotarna är inom hälsovården och som även finns med i artikeln. I detta kapitel beskrivs det vad det är som bidrar till accepterandet av robotar dvs. vilka mänskliga faktorer det är som bidrar till detta [2]. Det tas även upp hur människor ser på robotar och hur de mottar robotar vilket har undersökts genom en rad experiment. I detta kapitel däremot tas det upp ett experiment för att visa hur människorna reagerar och interagerar med en robot [1].
En demografisk karta över den äldre befolkningen visar hur framtiden ser ut. Den ökande äldre befolkningen ställer större krav på vård- och omsorgstagarna vilka blir allt mindre. Enligt en framtidsbedömning förväntas det mellan år 2000 och 2050 antal människor över 60 år att fördubblas. Robotar är ett exempel på assisterande apparat/enhet som möjligtvis kan komma att fylla gapet mellan den ökande äldre befolkningen och minskningen av vårdgivare [2].
“En robot kan definieras som ”a very powerful computer with equally powerful software housed in a mobile body and able to act rationally on its perception of the world around it””
Allmänhetens bild av robotar har mestadels skapats av filmer och det som visas på tv. Inflytandet från dessa områden kan ha bidragit till inställningen mot robotar inom äldrevården [2].
Forskarna utvecklar anordningar tillsammans med vårdtagarna där den äldre ska kunna leva kvar i sitt eget hem. Förutom att avlasta människan är detta även ett billigare alternativ med tanke på den växande äldre befolkningen och antal vårdgivare som kommer att behövas framöver. Anledningen till att dessa robotar utvecklas är främst för att ge äldre en chans att åldras i sitt eget hem där de känner sig tryggast. Då undviker de att förflyttas bort från familjen och omgivningar som de känner till [2]. Först och främst måste inställningen vara positiv för att accepterandet/mottagandet av robotarna ska kunna ske [22]. För att detta ska ske krävs det att den är lätt att använda samt att en motivation skapas som gör att man vill använda roboten och att individen känner en bekvämlighet på samtliga plan såsom emotionellt, kognitivt och fysiskt [2, 23].
Artikel [1] definierar en modell för teknologiacceptans baserad på Unified Theory of Acceptance and Use of Technology (UTAUT) modellen. Modellen gör det möjligt att utvärdera utöver praktiska nyttoaspekter av robotar också perspektivet social interaktion. Resultatet bidrar till förståelse av de äldres acceptans av “sociala” robotar.
Studierna som genomfördes bygger på denna modell. Modellen har utvecklat ett tillvägagångssätt som gör att man kan undersöka vilka faktorer som påverkar mottagandet av en ny teknologi.
16 Figur 8: UTAUT modellen
Modellen användes för att formulera ett antal frågor om olika aspekter på inställningen till robotar som kunde ställas till potentiella användare. Nedan ges några exempel på frågorna:
1. Om jag skulle använda roboten hade jag varit rädd för att göra misstag med den 2. Roboten skulle göra livet mer intressant
3. Jag tror att roboten kan anpassas till mina behov 4. Jag tycker att roboten är underhållande
5. Jag tycker att roboten är tråkig
6. Jag tror att jag kan använda roboten utan någon hjälp 7. Jag tycker att roboten är trevlig att interagera med 8. Jag tror att roboten kan hjälpa mig med många saker
9. När jag interagerade med roboten kände jag som att jag pratade med en verklig person 10. Ibland verkar robotar ha riktiga känslor
11. Jag skulle lita på roboten om den gav mig råd
Experiment
Det genomfördes ett antal experiment med olika grupper av personer där man undersökte inställningen till olika typer av robotar, se fig. 9.
Studien koncentrerar sig på teknik som ska interagera socialt med de äldre användarna och som är anpassad för att uppfylla deras behov [1].
17 Figur 9: Testutrustning (Uppe i vänstra hörnet är iCat och bredvid till höger RoboCare)
I ett experiment undersöktes de äldres interaktion med roboten iCat (uppe till vänster i fig. 9). 40 personer deltog i experimentet varav 22 var kvinnliga och 18 var manliga mellan åldern 65 och 89. Experimentet gick ut på att mäta deltagarnas reaktion på robotens verbala och icke verbala beteende. Roboten hade ögonkontakt med deltagaren, användes deltagarens tilltalsnamn vid kommunikation och bad om ursäkt vid eventuella misstag. Namnet iCat kommer från dess utseende som liknar en katt. Den kan dessutom göra ansiktsuttryck genom att röra ögonen, ögonbrynen och läpparna. I början av experimentet fick deltagarna en kort introduktion av själva roboten och vad den kan göra (vilka funktioner den har). Förutom att utgöra socialt umgänge kan iCat hålla reda på användarna, (tillhanda)ge information, hålla reda på dagordningen och påminna användaren om medicinering. Efter introduktionen fick deltagarna interagera med roboten under tre minuters tid. Under interaktionen kunde iCat ge en väderprognos, hänvisa till en mataffär med vägbeskrivning och ställa alarmet. Sedan fick deltagarna svara på ytterligare frågor där de fick chansen att utveckla sina tidigare svar som de hade gett i undersökningen [1].
En annan robot var Laura. En robot i form av en relationsagent (relational agent) som skapades för att undersöka de äldres mottagande av screen agenter. Hennes egenskaper skapades enbart för undersökning av äldres relationsuppbyggnad mot robotar. Hennes interaktion bygger på utbyte av empati, sociala dialoger, humor och andra meningsutbyten. Undersökningen visar att försökspersonerna såg agenten som en bra motpart de kunde föra en dialog med. De tyckte även att den var en bra rådgivare i hälsofrågor [1].
Enligt en annan studie, som också nämns i artikeln [1] där man jämförde screen agenter och robotar med visar det ingen större skillnad i hur människor beter sig mot dessa. Den lilla skillnaden man dock såg var att man litade en aning mer på robotar. Robotars utseende var mer tilltalande än en virtuell agent
18 vars kropp endast syns på en skärm. Bortsett från robotens utseende och förmåga att uttrycka sig genom ansiktsuttryck anser användarna att robotens sociala beteende är i högsta grad viktigt [1].
Resultat
Resultatet av experimentet visar att deltagarna föredrar att använda roboten som har ansiktsuttryck framför den neutrala som endast stirrar rakt fram. UTAUT modellen visar att försökspersonerna föredrog roboten som var mer uttrycksfull (extrovert) [1]. De ansåg den även vara mer socialt intelligent pga. rösten och dess ansiktsuttryck. Roboten iCat utstrålar på liknande sätt en social närvaro och sällskaplighet som gör den mer njutbar för dess användare. De faktorerna bidrar till användarnas vilja att använda roboten. Något som anses kunna uppfylla nödvändiga behov för att acceptans ska ske. Vad gäller agenten Laura skapade användarna ett sorts förtroende för henne och vågade öppna sig och därmed framkalla en dialog [1].
3.1 Studie år 1998
Studien i examensarbetet som gjordes år 1998 [3] där attityden mot interaktionen som sker mellan människan och Intelligent Service Agent (ISA) eller Intelligent Service Robot (ISR) undersöktes.
Målgruppen för en robot (ISA, ISR) är äldre personer som kan ha nedsatta (funktionella) förmågor eller är handikappade. För att uppfylla målgruppens krav måste ett system skapas som förstår både tal och gester, med andra ord ett flexibelt och absolut intelligent system.
”The goal is to develop a gesture understanding system for a domestic service robot, and to integrate the gesture information with speech.”
Det som genomsyrar arbetet är att många av de robotar som vi har idag har påverkats av science fiction genren. Det är inte bara av science fiction som vi har påverkats utan media har också haft sitt inflytande inom området. Med andra ord kan man säga att science fiction och media hänger ihop. Det som genren science fiction fantiserar ihop om robotar och dess funktioner blir till en film som speglas i media och tvärtom.
För att kunna stödja arbetet sökte man efter tidigare utförda empiriska studier, men fann dock inga. Studier av HMI (Human-Machine Interaction) och HCI (Human-Computer Interaction) hittades däremot som man hade kunnat relatera till och utifrån dessa skapa en möjlig utvärderingsmetod som behandlar attityden mot den ”nya” teknologin. En förstudie gjordes i form av en film- och litteraturstudie följt av intervjuer som utformades genom en enkät som gjordes på personer i åldern 15-80 i Sverige. Detta för att få en bättre och allmän uppfattning för attityden från målanvändarna eftersom ämnesfältet ännu inte är världskänt [3].
Personerna som man valde att intervjua valdes ut slumpmässigt. Sex personer i åldern 20-40 var lika könsfördelade, tre kvinnor och tre män. Anledningen till antalet är att man ville ha kvalitativ data och möjlighet att ställa underfrågor till personerna. Man började med att presentera ISR och sedan ställdes frågor angående intervjupersonernas bakgrund, familj, ålder, yrke, utbildning och intressen.
19
3.1.1 Resultat av studie
Utifrån svaren på intervjuerna [3] kunde man se tydliga associationer med science fiction där bland annat skräckfilm, programmerad maskin och konstig sak kommer på tal när associationer med ordet robot ska göras.
Skillnader märktes mellan männen och kvinnorna i förhållande till robotarnas användningsområde. Samtliga kvinnor såg roboten som en hjälpreda i hemmet som de hade kunnat dra nytta av och avbelasta sig själva medans männen såg roboten som något mekaniskt/maskintekniskt, en leksak eller ett verktyg. Männen ville dessutom göra hushållssysslorna på egen hand istället för att överlåta uppgifterna till en robot eller med andra ord en teknisk maskin. Användningsområden som kvinnorna däremot hade velat ha hjälp med är exempelvis tvätta fönster, städa och diska. Storleksmässigt ska den inte vara så stor. Upp till en meter lång och en halv meter bred tillräckligt för att den ska få plats i garderoben. Dessutom ska den helst inte vara könsfördelad, men å andra sidan hade intervjupersonerna velat ha (val-)möjligheten att utforma sin egen robot [3].
Vad gäller robotens fart ska den inte röra sig snabbare än när människan rör sig i normal fart. Man vill också kunna justera farten vid behov. Utöver den nödvändiga och förprogrammerade kunskapen som roboten borde ha ska den kunna anpassas utefter individen. Den ska lära sig av uppgifterna som den får och på så sätt utvecklas [3]. Nästa gång samma uppgift ges behöver roboten eventuellt inte lika avancerade instruktioner.
För att veta om roboten uppfattat uppgiften den tilldelats vill intervjupersonerna ha en bekräftelse genom verbal kommunikation. På samma sätt ska de kommunicera med roboten och emellertid med gester om så behövs [3]. Kopplat med första frågan vilken association ordet robot förde med sig ligger till grund för nästa fråga och svar. Det som påverkade bilden av robotar hos de intervjuade av (mestadels) från science fiction, media, filmer och tv. Bland annat kom filmerna Terminator och Star Wars på tal, som alla kände till men vars genre de inte tittar på i dagsläget.
Sist ställdes en fråga om priset och hur mycket de hade kunnat lägga ner på en robot för hemmabruk. De intervjuade ställer sig olika i prisrangen mellan 2000 kronor och 20 000 kronor [3].
Även om robotens närvaro accepteras, sänks inte kraven på den och dess egenskaper och funktioner med tanke på att den inte skulle utföra alla sysslor. Roboten fyller en god funktion där de intervjuade framförallt värdesatte fritid och tid där de kunde umgås med familjen istället för att behöva göra vardagliga hushållssysslor. En slutsats som också kan dras är att media har haft stort inflytande på den allmänna bild som byggts upp kring robotar som människor har idag. Denna bild har filmerna även speglat i sina berättelser eller är det kanske tvärtom? Eftersom ingen studie tidigare gjorts inom detta område var det väldigt intressant att se resultatet. Genom frågorna som ställdes ser vi ett positivt intryck till ISR (Intelligent Service Robot). Det i sin tur gav många bra och utvecklade svar som annars genom en negativ inställning inte hade kunnat fås. Nya frågor uppstod efter intervjuerna som besvarades med en enkät där personerna kunde utveckla sina svar ytterligare och precisera sig. Det man bland annat ville få ut är exakt vilka uppgifter man hade velat fånga in, dvs. vad de vill att roboten ska kunna utföra och vilken prioritet har de [3].
20
3.2 Faktorer som bidrar till acceptans
Faktorer som bidrar till acceptans [2] är individuella men bland annat ålder, kön, kultur, behov, utbildning, teknik- och roboterfarenhet. De äldre som var över 65 år gamla visade sig vara de som var mest negativa till robotar och ny teknologi överhuvudtaget. De yngre har oftast kommit i kontakt med teknik på jobbet och kanske även hört talas om robotar och robotteknik vilket medför ett lugn hos den yngre generationen. Ju högre utbildning desto större är chansen att robotarna har en positiv effekt på människan och den som är till viss grad införstådd med området. En skillnad mellan kvinnliga och manliga användare av robotar har funnits. Fler kvinnliga användare känner sig mer bekväma med en robot medan de manliga användarna ställer mer tekniska frågor. Kulturen spelar också en stor roll likaså vår uppväxt och det vi är vana vid. Franskar och tyskar visade olika attityder till robotar där tyskar tog mer avstånd från humanoider, dvs. människoliknande robotar. I allmänhet var amerikanarna mest positiva till robotar [2].
Beroende på hur stora behoven är och huruvida de existerar hos målanvändaren påverkar det hur den äldre ställer sig till robotar. Större hänsyn till behoven kan leda till positivare reaktion.
Även den kognitiva förmågan är viktig. Dock har det inte funnits mycket forskning kring hur oron eller ångesten påverkar accepterandet av robotar [2]. Trots det har människor hunnit skapa sig en bild av vad en robot är och en åsikt om denna.
Det är inte enbart upp till människan om huruvida vi tar till oss robotar. Många faktorer kommer från roboten själv. Det kan vara allt från design - mänskligt och omänskligt utseende, beteende som roboten har eller hur den kommunicerar och uttrycker sig genom ansiktsuttryck till dess storlek [2].
21
4. Empirisk studie
4.1 Introduktion
Denna studie ämnar besvara frågeställningarna:
- Vilka möjligheter och utmaningar finns det med robotteknik för människan i vardagen? - Hur ser medelålders personer på robotar i hemmet? I detta fall 40-60 åringar.
Personerna som intervjuades var mellan 40-60 år gamla och valdes ut genom ett urval och tillgång efter ålder och yrke för att täcka så bred yta som möjligt vad gäller bakgrundsvariation. Anledningen till att just denna åldersgrupp valdes ut är för att personerna som genomgick undersökningen år 1998 var mellan 20-40 år och är idag 40-60 år gamla. De tre kvinnorna och tre männen som intervjuades hade olika yrken: bilkontrollant, busschaufför, kriminalinspektör, kemitekniker, fabriksarbetare och dataingenjör. Alla var gifta och har barn. Samtliga intervjuade bor tillsammans med sina respektive och har ett till två barn som är vuxna.
I början av intervjun ställdes frågor kring ålder och yrke. Vidare tillvägagångssätt var att förklara kort hur intervjun kommer att gå till. Frågor som ställdes skulle få intervjupersonen att tänka efter och ta ställning till frågorna. Under intervjun visades tre bilder (fig. 3 och 9) på robotar som testats ute bland människor och gavs en kort beskrivning av där tanken var att fånga intervjupersonernas inställning till dessa. På så sätt även se huruvida personerna är positiva eller negativa till robotar inom vården och om en sådan marknad finns i Sverige. Intervjuerna finns i bilagan på sidan 30.
4.2 Frågorna
Mina frågor handlar bland annat om design, kunskaper och kommunikation som jag har skapat utifrån undersökningen som gjordes år 1998.
Så här såg intervjuformuläret ut:
Kön: Ålder: Yrke:
1. När jag säger ordet robot – vad säger du, vad tänker du på? Vad associerar du med ordet robot? Kan du tänka dig en sådan i hemmet?
2. Vad kan en robot göra? Vad borde en robot kunna göra enligt dig? a. Något särskilt som du skulle vilja ha hjälp med?
3. Vad borde roboten inte göra? Vilka egenskaper vill du inte att roboten ska ha?
4. Hur stor ska roboten vara tycker du? Hur mycket utrymme/plats ska den få ta upp i hemmet? 5. Vilket utseende ska den ha, hur ska roboten se ut?
a. Hur ser din inställning ut till vad som redan finns ute? (visat bilder, fig. 3 och 9) 6. Hur snabbt resp. sakta ska roboten röra sig? D.v.s. vilken fart ska den ha?
7. Vilken kunskap ska den ha? Vad vill du att roboten ska veta när du ställer frågor till den? 8. Hur ska den kommunicera och ge feedback?
9. Vad är det som har påverkat/haft inflytande på din bild om robotar?
10. Hur mycket är du villig att betala för att ha en robot i hemmet? (Spelar det någon roll hur dyr den är?)
22
4.3 Resultat
Fråga 1. När jag säger ordet robot – vad säger du, vad tänker du på? Vad associerar du med ordet robot? Kan du tänka dig en sådan i hemmet?
Samtliga intervjuade förknippade ordet robot med industri där den ersätter mänsklig arbetskraft. De flesta tyckte att roboten var mer precis/noggrann och outtröttlig. En av de intervjuade (intervju 3) uttalade även ett citat som syftar på föregående mening:
”jobbar som en robot”
Fråga 2. Vad kan en robot göra? Vad borde en robot kunna göra enligt dig? a. Något särskilt som du skulle vilja ha hjälp med?
Dessutom ställdes en följdfråga om huruvida de hade kunnat tänka sig ha en robot i hemmet. Svaret var överlag positivt, förutom att en var skeptiskt till hur roboten kommer att påverka den sociala biten. Man är rädd att förlora den mänskliga kontakten och hade helst då velat ha en kombination av robot och människokontakt.
”Roboten är mer som en tjänst/service” (int. 5)
Många uppgifter nämndes som man ville att roboten skulle utföra. Bland annat vill man att den ska kunna städa och dammsuga som en människa, lyfta tunga saker, hjälpa till vid gång och toalettbesök, påminna om medicinering, laga mat och dessutom inhandla matvarorna. En kvinna gav förslag på hur hon hade velat att detta går till där roboten beställer mat på nätet, sedan lagar den och ger den till mig (int.5). Sysslor såsom tvätta, hjälpa till vid dusch, promenera med den, köra en och slå larm om något skulle hända var också något som intervjupersonerna tog upp om vilka funktioner de vill att hemmaroboten ska ha. Med andra ord ska den underlätta för människan där människan får mer tid över till annat (att vara med familjen etc.) och där den agerar som ett verktyg i vardagen.
Fråga 3. Vad borde roboten inte göra? Vilka egenskaper vill du inte att roboten ska ha?
Egenskaper som man däremot inte vill att roboten ska ha är aggressivitet, möjlighet för roboten att agera aggressivt om användaren skulle agera likadant mot roboten. Man är rädd att roboten ska spionera på användaren och lägga ut material på nätet. Om användaren av någon anledning skulle bli aggressiv ska han inte kunna slå sönder systemet. Den ska inte kunna läsa tankar. En kvinna säger att hon inte skulle vilja att roboten duschar henne eller hjälper till vid dusch eftersom hon tvivlar på att den så kallade hjälpredan eller hjälpmedlet kommer att göra ett så noggrant jobb som en människa. En man påpekade dessutom att lagar ska finnas där den som jobbar med programmering av roboten inte kan missbruka sin makt.
23
Fråga 4. Hur stor ska roboten vara tycker du? Hur mycket utrymme/plats ska den få ta upp i hemmet?
Storleksmässigt tyckte två stycken att roboten ska vara lika stor som människan, men även att uppgifterna avgör storleken på roboten. Det ideala är möjlighet att justera längden beroende på robotens användningsområden.
Fråga 5. Vilket utseende ska den ha, hur ska roboten se ut?
a. Hur ser din inställning ut till vad som redan finns ute? (visat bilder, fig. 3 och 9)
Fem av sex personer vill ha en människoliknande robot, s.k. humanoid där man känner närvaron av en ”riktig” människa. Den ena personen som inte vill att roboten ska likna en människa är just därför, för att den inte är en människa utan ett verktyg som ska lyda instruktioner.
”En robot ska vara en robot. Den ska inte likna något annat” (int.6)
En del av de intervjuade kom även med detaljrika förslag kring robotens utseende. I detta fall dess huvud. En man sa att huvudet kan ha en fruktliknande form som man själv väljer vid beställning av roboten (int.2). Han sa även att han hade blivit glad av att vakna till en robot vars huvud liknar en frukt. En kvinna sa även om den till utseende skulle likna en människa så ska den vara ”metallaktig” och inte med hud för då hade den fått en mer vampyrutseende, vilket verkar skrämma folk.
På frågan om hur inställningen ser ut till vad som redan finns visade jag tre bilder (fig. 3 och 9): PARO [9], RoboCare och iCat [3]. Alla tre vars utseende varierar. Samtliga sex personer var väldigt positiva till sälroboten PARO. Den är bra för de tillbakadragna människorna som inte vågar öppna sig för någon annan, kanske i rädsla för den andres reaktion och roboten ger därför större förtroende än människan. Dessutom tyckte de intervjuade personerna att den är ett bra redskap som ersätter ett riktigt djur med behov. RoboCare däremot tyckte ingen om. Den verkar för enkel och oanvändbar. En kvinna sa (int. 5):
”En maskin som bara ska stå i hörnet”
Dessutom är den ”väldigt ful” sa en man (int.6). En annan man sa att han inte ser några händer på roboten och därför verkar den opraktiskt. Han sa även
”känns som att den kan filma dig”
vilket är bra i vissa sammanhang om man exempelvis skulle trilla, men då kan den inte hjälpa dig upp utan armar. Bild nummer tre där jag visade roboten iCat var mottagandet stort. Fem utav sex personer ställde sig positivt till roboten, men påpekar att den är opraktisk eftersom den är orörlig. En man (int.3) gav även förslag på dess funktioner och hur han hade velat att iCat ska vara. Främst att den ska kunna gå och att den kan påminna dig på medicinering när det behövs genom att räcka ut tabletterna vid utsatt tid. Han tyckte även att iCat framkallar känslor som djur annars i allmänhet gör eftersom roboten har en kattliknande form. En person (int. 6) som dock var emot roboten hade inte velat ha en sådan hemma.
24 Vill hellre ha något ovanligt såsom dinosaurie eller något som inte påminner om ett vanligt husdjur. Möjligtvis en blandning av två djur. Dessutom påpekade samma man att den inte har någon själv och den framkallar inte viljan att socialt interagera med den.
Fråga 6. Hur snabbt resp. sakta ska roboten röra sig? D.v.s. vilken fart ska den ha?
Vad gäller robotens fart var svaren splittrade. Någon vill att roboten ska ha människans takt som vi har vid normal gång, en annan sa att roboten varken ska vara för snabb eller för långsam och att tålamod krävs i väntan på att roboten ska utföra sina uppgifter. Dessa två takter eller farter kan förmodligen räknas till en och samma medelfart. Två stycken tyckte att roboten ska vara minst lika snabb som människan och snabbare. En man (int.6) gav ett exempel
”om den kan hämta ett glas vatten på två sekunder utan att spilla vatten får den göra det, om det inte ger negativ effekt”
Fråga 7. Vilken kunskap ska den ha? Vad vill du att roboten ska veta när du ställer frågor till den?
Fråga sju handlar om kunskapen som roboten ska besitta. Två kvinnor och en man (int. 3, 4 och 5) tyckte att roboten ska ha svar på tal oavsett vilken fråga som ställs. Man vill känna att man har någon eller något kompetent bredvid sig som man kan fråga om allt (int. 4). En annan man sa att det är viktigt att roboten vet vad den får och inte får göra. Med andra ord ska den lyda Asimovs tre lagar [5]och ej skada en människa om den skulle få detta i kommando. Det gavs även konkreta förslag på funktioner vilket inte är direkt kunskap, men däremot något som man vill att roboten ska veta. Roboten ska veta vilken dag det är, berätta när det är matdags, fråga om promenad, säga hur mycket klockan är, temperaturen i rummet osv. Dessa funktioner var något som alla tyckte var underförstådda och nödvändiga för roboten att ha.
Fråga 8. Hur ska den kommunicera och ge feedback?
Hur ska den då kommunicera ut sin kunskap var nästa fråga. Alternativen var många däribland muntlig kommunikation som nämndes flest antal gånger. Det är även viktigt med bekräftelse och feedback från roboten (int. 6) då användaren försäkrar sig om att roboten har förstått sin uppgift eller en given fråga. Vid behov ska du kunna skriva till roboten genom ett tangentbord och den ska kunna svara skriftligt tillbaka. Samtidigt kan det vara en blandning av muntlig och skriftlig kommunikation som stärker varandra och
”mättar båda sinnen” (int.3)
Fråga 9. Vad är det som har påverkat/haft inflytande på din bild om robotar?
På fråga nio vad det är som påverkat de intervjuades bild om robotar dök ett frekvent svar upp där tidningar och tv, med andra ord media i allmänhet verkar spela stor roll i inflytandet av den allmänna
25 bilden om robotar. En kvinna (int.5) och två män (int. 2 och 6) var pålästa inom ämnet och hade ett naturligt intresse för teknik i allmänhet vilket i sin tur
”har frambringat nyfikenhet kring robotar” (int. 2)
Den andra mannen (int. 6) hade dessutom en partner som var oerhört insatt i ämnet och fick mycket av sin kunskap om robotar från henne. Kvinnan i intervjun (5) som var påläst hade även varit på Certec föreläsningar [24] som handlar om framsteg inom robotik för äldrevården.
Fråga 10. Hur mycket är du villig att betala för att ha en robot i hemmet? (Spelar det någon roll hur dyr den är?)
Sista frågan som berör priset och hur mycket man är villig att betala för en robot i hemmet varierade stort i pris. Från att ha de enklaste funktionerna där det innebär att tvätta fönster och dammsuga kan man tänka sig lägga ut mellan 3000 kronor och 4000 kronor sa en kvinna. Samma kvinna svarade att hon hade kunnat ge högst 15 000 kronor för en robot som tvättar fönster och har all nödvändig kunskap (int.1). En annan kvinna nämnde 50 000 kronor men att det inte var en liten summa pengar när man väl går i pension och inte har sparat sedan tidigare. Trots det hade hon kunnat tänka sig betala av den summan även när hon är pensionerad om roboten har vad som krävs (int.5). Den tredje kvinnan jämförde hemmaroboten med industriella robotar (som kan kosta uppemot 20 miljoner kronor) och angav en summa på en miljon kronor som hon kan tänkas acceptera beroende på den rådande ekonomiska situationen (int.4). Männen la sig också på olika prisplaner. Mannen i intervju 2 tyckte också att priset spelar roll, men hade velat ha den dyraste roboten eftersom den antagligen är mest avancerad. Priset pekar upp mot 20 000 kronor. Den andra mannen säger att han ”hade vägt dess funktioner mot sina behov och sin plånbok” (int.6). Vad gäller priset hade han gett alla sina pengar efter att ha betalat mat, el och underhåll istället för att spendera pengar för att åka på semester. Roboten hade hjälpt honom i vardagen. Den tredje mannen (int.3) liknar roboten vid en bra bil för vilken han tycker att 300 000 kronor är rimligt att ge. Han anser också att man vid 70 års ålder ska ha sparat ihop tillräckligt med pengar för denna sorts behov.
26
5. Likheter och skillnader mellan studien år 1998 och 2012
Genom att läsa och studera Zayeras arbete [3] kan jag se en tydlig likhet mellan de två arbetena. Likheter och skillnader återges i texten som följer.
Likheter kan dras till undersökningen år 1998 [3] där personerna som blev intervjuade också associerar ordet robot med en ”programmerad maskin” som i detta fall syftar på industriell robot. En maskin som utför kommandon som förprogrammerats.
En jämförelse mellan mina 40-61 åriga personer och Zayeras 20-40 åringar där ordet tvätta dök upp flest antal gånger var i båda undersökningarna nämnt av kvinnorna. Dock fanns det en skillnad i undersökningen från år 1998 där ingen av de intervjuade ville ha hjälp med att laga mat. I min undersökning å andra sidan nämndes det ett flertal gånger att man hade velat att roboten lagar mat och även inhandlar varorna som behövs för att förbereda en måltid. Användandet av robotarna ska möjliggöra mer tid med familjen som alla 12 intervjuade var överens om. Det påpekas även i båda undersökningarna att det sociala är väldigt viktigt och att det är ingenting som de hade velat att roboten tar över fullständigt.
I Zayeras arbete [3] redogör hon för hur männen ser roboten som ett verktyg vars drag man också kan se hos männen i denna undersökning. Männen har en tendens att se roboten ur en lite annorlunda synvinkel där bland annat promenad och körning nämns men som kvinnorna inte nämnde.
Även storleksmässigt var både de yngre och de äldre personerna som blev intervjuade överens. Det idealiska är att kunna justera robotens längd beroende på uppgifterna som den ska utföra. Skillnader i svar mellan de som är 20-40 år och 40-60 år varierade vad gäller utseendet av roboten. De äldre vill ha en mer människoliknande robot och de yngre däremot hade inget särskilt anspråk på robotens form och utseende. Vad de sa dock är att roboten kunde ha inslag av industriellt utseende där roboten inte är könsfördelad. Frågorna som jag ställde om inställningen till befintliga robotar i vården fanns inte med i Zayeras arbete därför finns det varken någon likhet eller skillnad.
Eftersom svaren i denna studie var splittrade är det svårt att göra en jämförelse med de yngre intervjuade personerna från år 1998 angående robotens fart. Man kan säga att samtliga intervjuade la sig på en varierande fart skala vad gäller robotens fart och rörelser. Från normal gång till oerhört snabbt. Personerna i denna studie var mer precisa med sina svar och vad de vill att roboten ska veta när man ställer frågor. Personerna i den gamla studien från år 1998 vill däremot att de själva ska kunna lära roboten något och att den tillsammans med användaren ska växa och anpassa sig. Jämförelsevis visar den nya studien likheter med den gamla studien där samtliga tycker att det är viktigt att roboten ger feedback och bekräftar det han fått i uppgift eller att den uppfattat frågan som ställts. Påverkan av bilden om robotar verkar ha sitt ursprung från filmer och media vilket har visat sig i båda studierna. En tydlig skillnad ser man i prisklasserna mellan de olika åldrar som finns i undersökningarna. Betydligt fler personer i denna undersökning kan tänka sig att betala högre summor för roboten i hemmabruk, medan personerna i Zayeras arbete endast kan tänka sig lägga ut högst 20 000 kronor. Skillnaden kan bero på att personerna i denna undersökning som är 40-60 år är äldre och dessutom närmare pensionen, med andra ord ålderdomen där framtida behov kan tillgodoses med en robot. Förutom detta är dessa människor mer medvetna om teknikens framgång och om robotarnas kapacitet. Även pengarnas värde har betydelse eftersom pengarna var mer värda på den tiden medans man idag kan betala mer utan att det svider i plånboken lika mycket.
27
6. Diskussion
För att förbättra och få ett mer ”pålitligt” resultat i första artikeln hade man kunnat göra vissa moment annorlunda. Bland annat hade man kunnat göra försöket under en längre period, helst månader eller längre vilket hade resulterat i en tydligare helhetsbild över (det faktiska) användandet av denna teknologi. Vidare hade man velat se fler studier med andra så kallade ”assisterande sociala robotar” som har egenskaper som systemen som testades saknade.
Experimentets trovärdighet hade ökat om testet hade gjorts flera gånger på grund av faktorer som förändras över tid, såsom pålitlighet och attityd men även annat som kommer med åldern dvs. olika behov som utvecklas. Detta hade således lett till en förändring i syftet med användandet enligt UTAUT modellen [1]. Möjligtvis hade detta kunnat styrkas med forskning som pågått under längre tid.
Faktorer såsom ålder, kön, frivillighet och dataerfarenhet kan påverka resultatet. Även processen som bestämmer mottagandet eller accepterar något nytt som ska användas påverkas av faktorerna. Något man hade kunnat göra annorlunda är att låta intervjupersonerna rita en robot som de hade kunnat tänka sig ha hemma. I min undersökning ställde jag dock frågan kring utseende och då beskrev de intervjuade hur de tänker sig en robot.
Ytterligare något man hade kunnat göra annorlunda är att undersöka Tierps kommun där PARO har introducerats [15] för att se vad de har för syn på roboten särskilt med tanke på att de använder den. Likadant med Uppsala kunde man ha ringt och frågat efter människor som varit i kontakt med robotar i vården och fått deras synpunkt. En intervju hade kunnat göras med Susanne Frennert då hon forskar på området och även samla in hennes synpunkt vilket i sin tur hade kompletterat de andra intervjuerna.
7. Slutsats
Svaren som de intervjuade gav speglade i stort deras bakgrund som exempelvis yrke. Detta påverkade deras bild om robotar och hur de används. Även om alla var positiva till robotens introducering i hemmet som ett hjälpmedel var de samtidigt skeptiska på det sociala planet. De är rädda att den ska ta över människans roll och på så sätt förlora den mänskliga kommunikationen. I stort sett ser samtliga roboten som ett verktyg som underlättar fysiska aktiviteter. På fråga nummer tre där man efterfrågade oönskade egenskaper hos roboten var betänketiden längre där det påpekades att det var lättare att säga vad man vill att den ska göra och vilka egenskaper den ska ha. Samtliga eniga om robotens icke våldsamma feedback i alla möjliga situationer som kan uppstå, vare sig människan är våldsam eller inte. Fråga 10 var svår att besvara eftersom man inte vet hur ekonomin kommer att se ut vid tillfället men trots det gavs olika svar i form av pris och hur mycket man är villig att ge för en robot i hemmet. Intressant här är att se hur personerna i studien gör olika pris uppskattningar och om en viss summa är värd att ge för just den roboten de vill ha.
Många frågar sig vilken roll PARO kommer att ta över i äldrevården, men det är ingen enkel fråga. Tanken är att roboten PARO inte ska ersätta någon, förutom möjligtvis ett husdjur som människor med nedsatta funktioner inte hade kunnat ta hand om. Å andra sidan har relationen människa-maskin inom vården bara börjat ta form.
Givetvis är det väldigt komplicerat att både tillverka och programmera där en och samma robot passar in hos varje användare med tanke på de olika behov som finns. Varje enskild del som läggs till utöver det som annars är standard är kostsamt [23].
28 Genom hela arbetet har det funnits inslag av science fiction och hur dess genre har påverkat och fortfarande påverkar området robotar. Science fiction har fått oss att fundera på olika alternativa bilder av framtiden, samtidigt som genren i sig har gett oss många svar. Robotarnas representation i filmerna har en tendens att speglas i teknologin och dess uppbyggnad.
När man i framtiden bygger robotar till vård och omsorg finns det många aspekter och faktorer som man måste ta hänsyn till. Både individuella faktorer och robot faktorer.
29
8. Referenser
[1] Heerink. M, Kröse. B, Evers. V & Wielinga. B, Assessing Acceptance of Assistive Social Agent
Technology by Older Adults: the Almere Model, 2010.
[2] Broadbent. E, Stafford. R & Macdonald. B, Acceptance of Healthcare Robots for the Older Population:
Review and Future Directions, 2009.
[3] Khan, Zayera, Attitudes towards intelligent service robots, 1998.
[4] NE – Nationalencyklopedi [webbsida, läst 2012-09-07] Tillgänglig: http://www.ne.se/ [5] Brooks, Rodney A., Robot, the future of flesh and machines, 2002.
[6] Nordin & Wilde, Humanoider, Självlärande robotar och artificiell intelligens, 2003. [7] Rosheim, Mark. E. Leonardo’s Lost Robots, 2006.
[8] Robotics – A Brief History of Robotics [webbsida, läst 2012-05-02] Tillgänglig: http://robotics.megagiant.com/history.html
[9] PARO [webbsida, läst 2012-12-19] Tillgänglig: http://www.parorobots.com/ [10] Giraff [webbsida, läst 2012-12-19] Tillgänglig: http://www.giraff.org/ [11] Bestic [webbsida, läst 2012-19] Tillgänglig: http://www.bestic.se/hem/
[12] Norling. I, Djur i vården, Sektionen för vårdforskning vid Sahlgrenska universitetssjukhuset, 2002 [13] SVT – svtplay [webbsida, hämtad 2012-10-22]
Tillgänglig: http://www.svtplay.se/video/351235/kramgoa-robotar-pa-hemmet
[14] Shibata. T, Advanced Intelligent Mechatronics [webbsida, hämtad 2012-12-19] Tillgänglig: http://www.aim2011.org/downloads/takanori_shibata.pdf
[15] Demensbutik [webbsida, läst 2012-12-20]
http://www.octopus.se/index.php?Cat=nyheter&File=index
[16 ] Giraff [webbsida, läst 2012-12-19] Tillgänglig: http://www.giraff.org/ [17] Robotdalen [webbsida, läst 2012-20] Tillgänglig:
http://www.robotdalen.se/sv/Press/Pressmeddelanden/2011/Giraff-utnamnd-som-mycket-lovande-produkt-med-hog-innovationsniva-och-stor-marknadspotential/
[18] Bestic [webbsida, läst 2012-19] Tillgänglig: http://www.bestic.se/hem/
[19] Nylander, Stina and Ljungblad, Sara and Jiménes Villarreal, Javier, A complementing approach for
identifying ethical issues in care robotics – grounding ethics in practical use. In: Proceedings of 21st IEEE International Symposium on Robot and Human Interactive Communication, 2012.
[20] Robotnyheter [webbsida, hämtad 2012-12-19] Tillgänglig:
30 [21] Forex – valutaomvandlare [webbsida, hämtad 2012-10-27] Tillgänglig: www.forex.se
[22] Heerink. M, Kröse. B, Evers V & Wielinga. B, The influence of a robot’s social abilities on acceptance
by elderly users, 2006.
[23] Kulviwat. S, Bruner. GC, Kumar. A, Nasco. SA & Clark T, Toward a unified theory of consumer acceptance technology, 2007.
[24] Certec - Avdelningen för rehabiliteringsteknik inom Institutionen för designvetenskaper vid Lunds tekniska högskola [webbsida, läst 2012-10-16] Tillgänglig: http://www.certec.lth.se/
[25] PARO [webbsida, läst 2012-12-19] Tillgänglig: http://paro.jp/english/index.html
[26] Villarreal. J, Javier & Ljungblad, S, Experience Centered Design for a Robotic Eating Aid. In: HRI 2011. [27] Wikipedia [webbsida, läst 2013-02-07] Tillgänglig: http://sv.wikipedia.org/wiki/V%C3%A5rdgivare [28] LE – The literary encyclopedia [webbsida, läst 2012-09-07] Tillgänglig:
http://www.litencyc.com/php/speople.php?rec=true&UID=728
[29] Dyson, James, A history of great inventions, New York: Carroll & Graf, 2001 [30] Aftonbladet [webbsida, läst 2012-04-19] Tillgänglig:
http://www.aftonbladet.se/nyheter/article2814533.ab
[31] Wikipedia [webbsida, läst 2013-02-11] Tillgänglig: http://en.wikipedia.org/wiki/ASIMO
Bilder
Figur 2: Egen version av klassificering av robothjälpmedel
Figur 3: Återgiven med tillåtelse av Octopus Demens AB, Kerstin Lundström Figur 4: Clip Art bild, Microsoft Office
Figur 5: Återgiven med tillåtelse av Giraff; Press och Media
Figur 6 och 7: Återgiven med tillåtelse av Bestic; Pressansvarig Gabriella Winnberg Figur 8: Egen version av UTAUT modellen
Tack till Susanne Frennert som gav mig idén att jämföra 20-40 åringars attityder från år 1998 mot dagens 40-60 åringar. Ett stort tack även till mina handledare Ivan Kruzela och Göran Hagert som har hjälpt mig på vägen och funnits där som stöd.
31
BILAGA - Intervjuer
Intervju 1
Kön: Kvinna
Ålder: 57
Yrke: Bilkontrollant
1. Industriell robot, m.h.a. kan leka med den, modell robot små lika som industriella. Vid
20 års ålder var jag rädd att robotar skulle ta över världen.
2. Hämta något tungt resulterar i lata människor, mindre arbete för människan, kunna laga
mat, skala potatis
3. Inte positiv mot industriella robotar. Jag hade varit robot och roboten människa, jag
hade haft rollen som chef precis som i en fabrik.
4. Roboten kan ersätta jobb där människan kan fara illa. Hade inte velat ha en robot
hemma, endast putsa fönster, dammsuga nämndes men det finns redan dammsugare
till det.
5. Som en industriell robot, två ben, två armar, huvud precis som en människa.
a. Bild PARO. Reagerar positivt äldre människor behöver någon som de kan prata med
som inte säger emot och som reagerar med läten. Jättebra! Den som måste förstår
jag vill ha en robot i hemmet, för de som är själva
6. Rimligt för roboten att tvätta fönstren under den tiden som jag själv tvättar den.
7. Vad än du frågar den ska den kunna veta
8. Muntligt helst, manligt eller kvinnligt det kvittar. Om användaren är en kvinna ska det
vara manlig röst och tvärt om.
9. Från andra människor på jobbet, tv
10. 3000 – 4000 kr + 15 000 beroende på funktioner
Intervju 2
Kön: Man
Ålder: 60
Yrke: Busschaufför
1. Associerar med robotar som jobbar i bilfabrik. Robotar som hjälper äldre i Japan.
2. Påminna om medicinering, hjälp vid toalettbesök, umgänge, vara underhållande
3. Spionera, lägga ut på internet, icke våldsam- snäll
32