Teknik och samhälle Datavetenskap
Examensarbete
15 högskolepoäng, grundnivå
Värmekameror och människor
Thermal cameras and people
Timo Dadashvand
Elvin Lapovski
Sammanfattning
Användningen av termisk infraröd strålning sprider sig till nya användningsområden. Ett område är säkerhetsövervakning via värmekameror. Värmekameror har en fördel jämfört med vanliga säkerhetskameror som endast bearbetar synligt ljus eftersom detta inte påverkar värmekameran i samma utsträckning. Syftet med detta projekt är att undersöka möjligheter för att åstadkomma högre noggrannhet i temperaturmätningar med en värmekamera. Genom att använda oss av tekniker som används som bästa praxis inom liknande områden kalibreras vår värmekamera till högre noggrannhet. Detta med hjälp av tekniker som två-punktskalibrering med svartkroppar för att få ett referensvärde för två olika temperaturer. Därefter kan andra okända temperaturer beräknas. Vi använder oss av medelvärdesbildning för att bli av med temporalt och spatialt brus. Med denna metod får vi en bättre bild av genomsnittstemperaturen för varje värmebild. Vår kalibrering av värmekameran testas sedan i ett experiment där vi mätte högerhänderna på testpersonerna. Dessa resultat jämförs sedan med en annan värmekamera som inte kalibrerats. Testresultaten visar att vi lyckats uppnå en högre noggrannhet av värmekameran med en variation högst 0.348°C vid mätning av en människas hudtemperatur. Detta visar att kalibreringen är i allmänhet gynnsam.
Abstract
The usage of thermal infrared radiation spreads to new fields. One area of use is security monitoring with thermal cameras. Thermal cameras have an advantage over regular security cameras which only processes visible light as this does not affect the thermal camera to the same extent. The purpose of this project is to investigate the possibilities for achieving higher accuracy in temperature measurement with a thermal camera. By using best practice methods applied in similar areas, our thermal camera is calibrated to measure temperature with a higher accuracy. Methods such as two-point calibration with black bodies are used to get two reference values from two different temperatures. The reference values can then be used to calculate unknown temperatures. Image averaging is applied to get rid of temporal and spatial noise. This method provides a clearer thermogram of the average temperature. Our calibration of the thermal camera is tested in an experiment where we measure the right hands of test subjects. These results are compared with the results measured from a non-calibrated thermal camera. The test results show that we managed to achieve a higher accuracy with the thermal camera with a maximum variation of 0.348°C when measuring human skin temperature. This shows that the calibration is generally favorable.
Förord
Vi vill uttrycka vår tacksamhet till Susanne Dunér och Thomas Winzell på Axis Communications för deras ovärderliga insatser, råd och tips som har hjälpt oss vidare i vårt arbete. Deras hjälp gjorde det möjligt för oss att färdigställa arbetet till den kvalitet och inom den tidsram som krävdes.
Innehållsförteckning
1 Inledning 1 1.1 Bakgrund 1 1.2 Axis Communications 1 1.3 Mål 2 1.3.1 Forskningsfråga 2 1.4 Avgränsningar 22 Fysikaliska och tekniska grunder 3
2.1 Värmekameror 3 2.2 Infraröd strålning 3 2.3 Sensorer 4 2.4 Medelvärdesbildning 4 2.5 VAPIX 4 2.6 FPGA 4
2.7 Förstärkning och förskjutning 5
2.8 Två-punktskalibrering 5
3 Relaterad forskning 6
3.1 A. Persson - Screening av maligna melanom med hjälp av infraröd avsökning över
hudområden 6
3.2 S. Bagavathiappan et al. - Infrared thermal imaging for detection of peripheral vascular
disorders 6
3.3 S. N. Torres et al. - On Non-uniformity Correction 6
3.4 E. Alcevska et al. - Felanalys av en ultraljudsprobe med hjälp av bildbehandling 7 3.5 M. Burton et al. - Robust representations for face recognition: The power of averages 7 3.6 P. Goyal - Studying the performance parameters on real infrared image/data and evaluation
by application of the NUC algorithm 7
4 Metod 9
4.1 Litteraturstudie 9
4.1.1 Avgränsning av litteraturstudie 9
4.2 Hur kontrollerat experiment applicerades på arbetet 9
4.2.1 Teori 9 4.2.2 Hypotes 10 4.2.3 Experiment 10 5 Resultat 12 5.1 Värmekameror 12 5.1.1 AXIS Q1942-E 12
5.1.2 AXIS Q2901-E 13
5.1.3 Val av värmekameror AXIS Q1942-E och AXIS Q2901-E 13
5.2 Inställning av värmekameran AXIS Q1942-E 14
5.3 Hur medelvärdesbildning applicerades 14
5.4 Kalibrering av värmekameran AXIS Q1942-E 16
5.4.1 Programkod för kalibrering 16
5.4.2 Validering av kalibrering 17
5.5 Experiment 19
5.5.1 Python script 19
5.5.2 Förberedelser 19
5.5.3 Mätresultat och validering med AXIS Q2901-E 20
6 Analys 25
6.1 Analys av experimentuppställning och experimentmiljö 25
6.2 Analys av testpersoner 25
6.3 Analys av resultat 26
6.3.1 Analys av kalibrering 26
6.3.2 Analys av medelvärdesbildning 26
6.3.3 Analys av jämförelse med AXIS Q2901-E 26
7 Diskussion 28
7.1 Experimentuppställning och experimentmiljö 28
7.2 Kalibrering 29 7.3 Mätresultat 29 7.4 Metoddiskussion 30 Ordlista 32 Referenser 33 Bilaga A 35 Bilaga B 36
1 Inledning
Användningsområden för infraröd strålning (IR) blir allt bredare. William Herschel upptäckte IR-strålning på 1800-talet [4] och använde detta främst för enbart mätning av värme. Därefter har användningen av IR spridits till andra områden. Kapitlet förklarar bakgrunden till arbetet, målet och problemställningen.
1.1 Bakgrund
Användningen och nyttjande av termisk infraröd strålning sprider sig till nya ämnesområden, till exempel övervakning av industriellt maskineri [6] för att detektera fel. I räddningstjänst genom så kallade unmanned aerial vehicles (UAV) [7], där flygande robotar är utrustade med värmekameror för att detektera människor i behov av räddning. Ett annat område är säkerhetsövervakning via värmekameror. Värmekameror skapar bilder baserade på värmen som utstrålas av ett objekt eller person [8]. Skillnaden med värmekameror framför vanliga säkerhetskameror är främst att värmekameror mäter infraröd värmeutstrålning och inte ljus. Detta gör att värmekameror har en fördel jämfört med vanliga säkerhetskameror som endast bearbetar synligt ljus. Exempelvis kan en värmekamera leverera liknande resultat vare sig det är i nattmörker eller i fullt dagsljus eftersom den inte är beroende av ljus vilket en säkerhetskamera som mäter synligt ljus är [8].
Problemet är att mängden värme ett objekt utstrålar är inte endast beroende av temperatur. Mängden termisk infraröd strålning som strålas ut beror även på objektets emissivitet. Emissivitet är ett mått på ett objekts förmåga att utstråla absorberad energi i förhållande till en perfekt svartkropp [2, 16]. En perfekt svartkropp är ett objekt som kan absorbera all inkommande strålning utan att reflektera något [16]. Värdet på ett objekts emissivitet (e-värde) är beroende av dess yta, material och opacitet [5]. Ju mer reflektivt material ett objekt består av desto lägre e-värde har den [2].
Det finns även en nivå av brus i den inkommande signalen som gör det svårare att mäta mer noggrant än med en marginal på plus/minus en grad Celsius [2, 20]. Bruset kan komma från elektriska fluktuationer i signalen eller från sensorn eftersom den är okyld och påverkas av sin egen värmeutstrålning. En kyld sensor har visserligen också en viss mängd brus, dock betydligt mindre då den kyls ned till att hålla vald temperatur. Dessa fluktuationer i temperaturmätningar skapar hinder när man vill göra mätningar där små temperaturskillnader är av stor betydelse. Till exempel när man undersöker en patient för PVD (peripheral vascular disease), handlar det om marginella temperaturskillnader på en grad eller mindre för att upptäcka sjukdomen [15].
En lösning till detta skulle kunna vara att förbättra värmekamerans förmåga att mäta mer precisa temperaturer vilket skulle göra mätresultaten mer noggranna. Detta skulle även kunna leda till ytterligare nya möjligheter för forskning och utveckling inom termografi. Exempelvis eventuellt kunna upptäcka sjukdomar tidigare, lokalisera hälsoproblem och dokumentera sjukdomsförlopp.
1.2 Axis Communications
Axis Communications är ett svenskt företag med fokus på nätverksvideo. Ett utav deras projekt fokuserar på att kunna nyttja värmekameror inom sjukvård. I detta examensarbete bidrog Axis Communications med att formulera forskningsfrågorna. Värmekameror och andra verktyg tillhandahölls även för forskningen.
1.3 Mål
Som beskrivet ovan finns det problem med faktorer som påverkar temperaturmätningar. Om det gick att utföra mätningar där dessa faktorer elimineras skulle detta kunna ligga till grund för vidare utveckling och forskning. Speciellt inom områden där små temperaturskillnaden är av stor betydelse som till exempel inom sjukvård. Målet med detta arbete är därför att förbättra en värmekameras noggrannhet för att detektera små temperaturskillnader.
1.3.1 Forskningsfråga
Arbetet fokuserar på hur man kan kompensera för de problem som uppstår vid mätning av värme och på så sätt förbättra noggrannheten i mätningen. Detta löses genom att besvara två frågor:
RQ1 Hur kan man åstadkomma högre noggrannhet i temperaturmätningar med en värmekamera? RQ2 Vilka tekniker kan användas för att kalibrera en värmekamera?
Fokus ligger på att undersöka tekniker som kan användas för att kalibrera en värmekamera till en ökad noggrannhet.
1.4 Avgränsningar
Arbetet ämnar att undersöka tekniker för att förbättra noggrannheten hos en värmekamera. Teknikerna kommer inte att utvärderas för att mäta kvaliteten eller liknande. Dessa tekniker kommer heller inte att användas för att kalibrera andra värmekameror för en jämförande studie.
Felfaktorer som arbetet kommer att avgränsas till är huvudsakligen vind och omgivningstemperatur. Detta på grund av rekommendation från Axis då vind ansågs vara största faktorn för temperaturförändringar [12]. Andra felfaktorer som kan påverka temperaturmätningar tas upp av S. Bagavathiappan et al. [15] som luftfuktighet, varma- och kalla källor som kan påverka testpersonen och antal personer som tillåts vara i testmiljön (se avsnitt 3.2). Dessa faktorer kommer inte att regleras i det praktiska experimentet i detta arbete på grund av bristande resurser.
2 Fysikaliska och tekniska grunder
2.1 Värmekameror
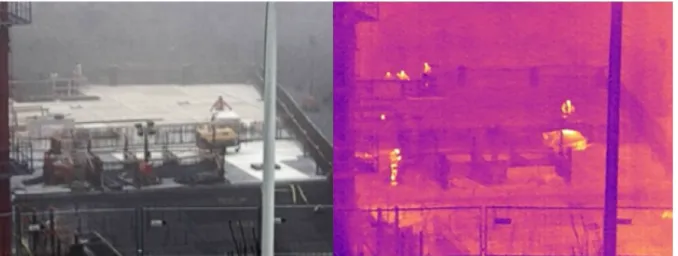
En värmekamera skapar bilder baserat på infraröd strålning. Alla objekt och organismer avger en viss mängd värme [2]. Värme är en form av ljus som är osynligt för ögat och kallas även termisk infraröd strålning. En värmekamera fungerar som en värmesensor som detekterar temperaturskillnader mellan objekt och miljön runt omkring. En värmekamera visar en visuell bild av infraröd värmeutstrålning och inte en bild av ljus, det vill säga så kallade värmebilder. Värmebilder visas generellt sett i gråskala där mörk färg indikerar kallare temperatur och ljus färg indikerar varmare temperatur [2, 9]. Mest information ges från värmebilder vid signifikanta temperaturskillnader i en miljö, vilket även visas i figur 1.
Figur 1: Skillnad mellan en bild tagen i synligt ljus och värmebild (Källa: Axis Communications)
2.2 Infraröd strålning
Alla objekt med en temperatur överstigande den absoluta nollpunkten (-273°C) utstrålar IR-strålning [11]. Ju varmare ett objekt är desto mer IR-strålning utstrålar det. Det infraröda våglängdsområdet i det elektromagnetiska spektrumet sträcker sig mellan 0.7-1000µm (illustration av det elektromagnetiska spektrumet visas i figur 2) [2, 15]. Av detta våglängdsområde används två mindre områden för att mäta termisk infraröd strålning med en värmekamera [2]. MWIR omfattar våglängdsområdet mellan 3-5µm och LWIR mellan 8-14 µm [10]. MWIR används vid förhållanden där kontrasten mellan objekt och bakgrund är höga. LWIR används istället vid lägre kontrastskillnader mellan objekt och bakgrund [13].
Figur 2: Det infraröda våglängdsområdet i elektromagnetiska spektrumet (Källa: https://www.intechopen.com/source/html/17173/media/image3.jpeg)
2.3 Sensorer
I värmekameror finns sensorer som tar emot termisk infraröd strålning och konverterar strålningen till elektriska signaler [2]. Sensorer för värmekameror förekommer som kylda och okylda sensorer. En kyld sensor behöver kylas ner till en vald temperatur mellan 50-100 K (ca. -210 till -170°C) för att åstadkomma bra kvanteffektivitet, dvs. förmågan att konvertera antal räknade fotoner till elektroner [2, 20]. Kylningen minskar värmepåverkat brus [2, 13] vilket möjliggör mer högupplösta värmebilder samt noggrannare mätning av temperaturskillnader. En okyld sensor, oftast bolometer, drivs i omgivningstemperatur. I en bolometer används en termistor som klarar av höga temperaturer [2, 9, 13]. Bolometern mäter temperaturförändringen genom att mäta förändringen i resistans när temperaturen av sensorn ändras. När termisk infraröda strålar når bolometern ändras den elektriska resistansen vilket leder till en förändring i elektrisk signal. Bolometern placeras på silikon för att isolera värme. Okylda sensorer är mer vanligt förekommande än kylda då de är betydligt billigare att tillverka [2].
2.4 Medelvärdesbildning
Brus i mätningar av värme är ett konstant problem som är svårt att eliminera helt [25]. Detta beror på elektriska fluktuationer i signalen [24]. Man skiljer huvudsakligen på spatialt (tidsoberoende brus) och temporalt (tidsberoende brus). Spatialt brus, även kallat områdesbrus [22], är det brus som återfinns i en bild. Därför är den tidsoberoende. Spatialt brus detekteras genom att jämföra en viss punkt i en bild med området runt omkring [22]. Temporalt brus varierar med tiden [25]. Detta är en typ av brus som varierar från bild till bild. Därför utförs medelvärdesbildning, för att få bort avvikelser som orsakas av brus. Medelvärdesbildning innebär att ett antal bilder adderas för att sedan beräkna ett medelvärde av temperaturen för varje pixel. Till exempel om 50 bilder tas av samma objekt kan en pixel anta en temperatur mellan 20-20.5°C på 45 av bilderna men på 5 av bilderna hamnar temperaturen på 18-21°C.
2.5 VAPIX
VAPIX är ett öppet HTTP-baserat API framtaget av Axis Communications för kommunikation med produkter från Axis. Alla nätverkskameror från Axis är förprogrammerade med stöd för VAPIX. Funktionalitet som kan utnyttjas från kamerorna är bland annat att begära bilder, PTZ funktioner, sätta nya inställningar och dylikt [3]. Vissa funktionaliteter varierar beroende på kameratyp. Med HTTP-baserade API:er skapar man stöd för utveckling i flera utvecklingsspråk.
2.6 FPGA
FPGA (Field-programmable gate array) är en integrerad krets [23] för att hantera logik och bildbehandling. Till skillnad från en ASIC (application specific integrated circuit) är en FPGA okonfigurerad dvs. kräver att en utvecklare eller designer skapar en konfiguration och laddar in den i FPGA-kretsen. En ASIC-krets kommer förkonfigurerad enligt de specifikationer som bestämts i förväg. Dessutom är en ASIC oföränderlig vilket kräver att den designas rätt från början. Fördelen med en FPGA är att den går att omkonfigurera vilket gör det lätt att lägga till och ändra kod.
2.7 Förstärkning och förskjutning
Förstärkning är en “upphöjning” av en signal [27]. Förstärkning av en signal förhindrar värden från att tappas när ADC:n (Analog-to-digital converter) omvandlar en analog signal till digital. Dessutom förhindrar den signalvärdet ifrån att hamna på 0. Till exempel om man har en analog signal som motsvarar 0.1 i digital signal och ADC:n inte kan hantera decimaltal kommer detta avrundas till 0. Då har man inte bara förlorat värdet 0.1 utan det är även omöjligt att få fram korrekt resultat genom beräkningar med värdet 0. Detta kallas kvantiseringsfel.
En förskjutning är en ändring av en signal genom att lägga till likspänning. Detta görs för att se till att alla signaler som eventuellt kan komma från sensorn omvandlas till ett digitalt tal annat än noll.
2.8 Två-punktskalibrering
Två-punktskalibrering är en teknik för kompensering av spatial olikformighet (även kallat brus) vilket uppstår i värmebilder [26]. Denna teknik fokuserar på att kunna ta fram exakta värden i en värmebild genom att ta värmebilder av en temperaturkontrollerad svartkropp vid två kända temperaturer. Förstärkningen och förskjutningen, som används till att beräkna okänd temperatur, kalibreras därefter med svartkropparnas värden som referens. Genom denna teknik fokuseras de värden och data fås ut från mätningarna för att kompensera bruset. För att ta en bild kräver denna teknik att kamerans operation stoppas, dvs. den kan inte kalibrera en bildström i realtid. Utöver detta är ännu ett problem att denna olikformighet skiftar långsamt med tiden. Därför går det inte att utföra en engångskalibrering för att lösa detta problem.
3 Relaterad forskning
3.1 A. Persson - Screening av maligna melanom med hjälp av
infraröd avsökning över hudområden
Anders Persson undersöker möjligheterna för att utveckla nya screening-metoder på hudkliniker [19]. Temperaturmätningar för att detektera maligna melanom utfördes på patienter under två dagar på hudkliniken, Skånes universitetssjukhus i Lund, med en värmekamera från Axis Communications. Målet var att kunna upptäcka mindre temperaturskillnader på en cancerogen vävnads yttemperatur och en icke-cancerogen. Genom att absolutkalibrera värmekameran inom ett visst intervall kan kameran användas för medicinskt bruk. Genom absolutkalibreringen blir kamerans känslighet förbättrad till att kunna avgöra skillnader på så låga värden som 0.2°C.
Temperaturmätningarna utfördes på patienterna i ett mottagningsrum. Efter lokalisering av den cancerogena vävnadsytan togs först ett referensfoto med en vanlig kamera, därefter togs 50 bilder med värmekameran för att kunna skapa en medelvärdesbild för att minska brustoppar. Mätningen upprepas därefter på liknande vis på en icke-cancerogen vävnadsyta och en jämförelse mellan vävnadsytorna kunde göras.
3.2 S. Bagavathiappan et al. - Infrared thermal imaging for detection
of peripheral vascular disorders
S. Bagavathiappan et al. [15] undersöker hur termografi kan användas för att diagnostisera perifer vaskulär sjukdom (PVD). Temperatur-kartor observeras inom de PVD påverkade områdena och dessa bilder indikerar onormalt blodflöde. Detta visar på att termografi korrelerar väl med de kliniska underlagen. Delar av de påverkade områdena påvisar ökad temperatur vilket förmodligen beror på inflammation och underliggande ändringar i venflöde. Generellt sett är temperaturskillnaden i de påverkade områdena 0.7-1°C högre än i de icke påverkade områdena vilket beror på dålig blodcirkulation. Resultatet visar att termografi är en effektiv teknik för att detektera mindre temperaturskillnader i människokroppen som orsakas av kärlsjukdomar.
Testets utformning gick ut på att patienterna fick vila i ett rum där luftfuktighet och temperatur kontrollerades. Inga delar av patienten var i kontakt med någon varm eller kall källa. Endast ett kontrollerat antal människor tilläts vara i rummet. Dessa försiktighetsåtgärder hade tagits för att minimera antal variabler som skulle kunna påverka temperaturmätningen. Patienterna fick klä av sig så att de påverkade områdena var exponerade i 15 minuter. Värmekameran som användes för mätningen positionerades 1 meter ifrån patientens påverkade område. Det påverkade området observerades på en skärm med pseudofärger för att göra det lättare att se temperaturskillnader. Baserat på ovan nämnda förhållanden kunde temperaturskillnaden i det påverkade området bestämmas.
3.3 S. N. Torres et al. - On Non-uniformity Correction
S. N. Torres et al. [26] undersöker olika sätt att kompensera för brus (spatial olikformighet) som uppstår vid mätningar med värmekamera. Non-uniformity correction (kompensering av spatial olikformighet) är kompensering av brus som skapar olikformighet i mätningar av värme. Förutom problemen med att utföra mätningar av värme (brus) beskriver de även två olika sätt att kompensera
Den kalibreringsbaserade tekniken för kompensering av brus fokuserar på att ta fram exakta värden. Den vanliga metoden är att använda två-punktskalibrering genom att ta bilder av en svartkropp vid två kända temperaturer. Därefter beskriver de nästa steg som följande:
“The gain and the bias of each detector are then calibrated across the array so that all detectors produce a radiometrically accurate and uniform readout [...]”.
Det vill säga att förstärkningen och förskjutningen kalibreras därefter med svartkropparnas värden som referens. Genom denna teknik fokuserar man på de värden och data man får ut från mätningarna för att kompensera bruset.
Den scenbaserade tekniken fokuserar på att framställa en så grafiskt bra bild utan brus som möjligt. Genom att detektera skillnader i temperatur på objekt inom bilden använder man dessa temperaturskillnader för att kalibrera resterande punkter i bilden. Detta kommer dock med en nackdel att man inte fokuserar på exakta temperaturer utan endast på temperaturskillnader i bilden.
De två olika teknikerna har även en stor skillnad i vad som krävs från värmekameran. Den kalibreringsbaserade tekniken kräver att kamerans operation stoppas (för att ta en bild) medan den scenbaserade tekniken kan strömma bilder utan att stoppa kamerans operation. Utöver detta är ännu ett problem att denna olikformighet skiftar långsamt med tiden. Därför går det inte att utföra en engångskalibrering för att lösa detta problem.
3.4 E. Alcevska et al. - Felanalys av en ultraljudsprobe med hjälp av
bildbehandling
E. Alcevska et al. [21] undersöker hur man kan behandla defekta områden i en bildsekvens för att sedan klippa ut detta område så att man minimerar antalet defekta områden i ultraljudsbilder. De använder medelvärdesbildning för att identifiera skillnader för varje enskild pixel i en bildsekvens. De lagrar pixlarnas värde i matriser för att sedan utföra sin medelvärdesbildning. Detta utförs i fyra steg. Det första steget är att göra ett histogram av objektet som mäts utan medelvärdesbildning. Nästa steg är att utföra medelvärdesbildning och sedan ett nytt histogram. Tredje steget är att skära ut de defekta områden från bilden. Slutligen är det sista steget att färglägga det defekta område som skurits ut.
3.5 M. Burton et al. - Robust representations for face recognition:
The power of averages
M. Burton et al. [9] skriver om hur en representation av ett ansikte ändras när man blir mer bekant med det. De använder medelvärdesbildning på bilder av ansikten för att sedan kolla om testpersonen känner igen ansiktena lättare efter medelvärdesbildningen. Resultatet från deras tester visar att system baserat på denna sorts abstraktion av ansikten är överlägsen ett system baserat på ett lager av instanser av ansikten. De nämner även att denna sorts testning är väldigt komplex eftersom förmåga att känna igen ansikten kan variera bland testpersonerna och är alltså något som inte kan kontrolleras av forskarna. Trots detta visar deras resultat att testerna ändå gynnar en metod över den andra.
3.6 P. Goyal - Studying the performance parameters on real infrared
image/data and evaluation by application of the NUC algorithm
P. Goyal [1] skriver om sin sensorkalibrering av spatial olikformighet. P. Goyal förklarar vidare att även om IR sensor-teknologi har utvecklats väldigt mycket så finns det fortfarande felfaktorer som påverkar mätningar. Exempel på dessa felfaktorer är variation i sensorns temperatur, begränsad
detta resulterar i både temporala och spatiala olikformigheter vilket sänker kvaliteten på värmebilderna som tas. Vidare förklarar P. Goyal att dessa olikformigheter kan bero på variationer i sensorns temperatur eller skillnader i radians från scenen som mäts. Därför undersöker P. Goyal hur man kan kalibrera en IR sensor för att kompensera för dessa problem.
Output från sensorns hämtas vid olika integrationstider genom att utsätta sensorn för en likformig temperaturkälla. Därefter utför Goyal kompensering för spatial olikformighet (NUC) genom en två-punktskalibrering med en temperaturkontrollerad svartkropp. Videobehandlingen i systemet som skapades utförde kompensering av spatial olikformighet, dålig pixel ersättning, automatisk kontroll av förstärkning och andra bildförbättringsfunktioner som kontrastförbättring och histogram utjämning. Goyal utför även medelvärdesbildning på åtta bilder för att reducera temporalt brus.
Resultaten visar att olikformigheterna reduceras från 6% till mindre än 0,6% efter att korrigeringen utförts. Vidare observeras att systemet är kalibrerat enligt två-punktskalibrering. Det spatiala bruset efter kompenseringen av olikformighet jämförs med systemets temporala brus och resultaten visar att det spatiala bruset reduceras signifikant lägre än systemets temporala bruset.
4 Metod
Ett experiment kommer att utföras i enlighet med principerna för kontrollerade experiment (controlled experiment) som definieras av S. Easterbrook et al. [17]. Denna metod valdes på grund av dess strukturering av processer. Kontrollerat experiment är starkt kopplat till positivism [17] som hävdar att all kunskap måste baseras på logiska resonemang. Detta uppnås genom att bryta ner problem till enklare komponenter. Sedan testas dessa i isolation för att studera orsak-verkan [17, 28]. Processen bygger därför i huvudsak på att man definierar i förväg vad som ska testas, vilka faktorer som tillåts påverka experimentet och även vilka testobjekt som ska väljas. Med tydliga steg och en metod som är väl anpassad till arbetets syfte blir det lättare att strukturera arbetet. Det blir även lättare att utvärdera vad som lyckats och vad som inte lyckats.
4.1 Litteraturstudie
Syftet är att sätta sig in i ämnet och hitta litteratur kring forskning inom ämnet och undersöka tekniker och metoder som är bäst lämpade för valt användningsområde.
4.1.1 Avgränsning av litteraturstudie
Studiens fokus begränsas till att endast innefatta kalibrering av värmekamera och mätning av människohud med värmekamera. Genom dessa avgränsningar delas studien upp i två områden för att granskas individuellt.
● Temperaturmätning: Tidigare forskning, ramverk, felfaktorer och experiment kring temperaturmätning av människohud.
● Kalibrering: Metoder och tekniker för mer noggrann temperaturmätning.
Litteraturstudien inriktas huvudsakligen kring litteraturdatabasen IEEE eftersom den är väletablerad inom datavetenskapen. Förutom detta kommer även källor från akademiska sidor som universitetssidor med forskning kring problemområdet att granskas.
För att undvika föråldrad teknik och forskning kommer sökningen i IEEE att begränsas till att prioritera artiklar från publiceringsår 2010 och framåt. Detta för att hålla nivån av forskningen så aktuell som möjligt. Eftersom arbetet innehåller utförande av ett experiment kommer sökningen även att filtreras efter de artiklar som innehåller beprövad testning eller experiment. Främst för att analysera tekniker för att mäta och kalibrera en värmekamera i de artiklar som innehåller tester med värmekameror. I de fall en artikel ej innehåller test med värmekamera kan metoder och tillvägagångssätt granskas.
4.2 Hur kontrollerat experiment applicerades på arbetet
4.2.1 Teori
Det logiska resonemang som arbetet baseras på är det faktum att mätningar av värme påverkas av externa faktorer som elektriska fluktuationer (brus), sensorns externa temperatur och förskjutning. Beroende på dessa faktorer påverkas signalen som ska mätas och därmed resultatet.
4.2.2 Hypotes
Syftet är att ta reda på hur man kan kompensera för dessa externa faktorer för att åstadkomma noggrannare mätningar av värme. Baserat på teorin tror vi att genom kompensering av dessa felfaktorer kommer vi påvisa mer precisa mätningar av värme än vad som går utan kompensering.
4.2.3 Experiment
För att testa hypotesen samt besvara problemformuleringen utförs ett experiment. Experimentet består av två delar; förbereda värmekameran med en absolutkalibrering för att förbättra noggrannheten och sedan utföra testerna på testpersoner med en kalibrerad värmekamera och en som inte blivit kalibrerad. Dessa delar kommer att användas för att besvara forskningsfråga 1 och 2.
För att validera testresultaten är det viktigt att i förväg definiera vad det faktiskt är som ska testas och hur detta ska utformas för att uppnå målet med arbetet. Detta beskrivs nedan i detta kapitel. Absolutkalibrera värmekamera
Värmekameran absolutkalibreras för att kunna detektera mindre temperaturskillnader än vad som går med en värmekamera som inte blivit kalibrerad. Detta genom att fokusera kamerans mätningsintervall till ett betydligt mindre med en två-punktskalibrering. Problemet är att det är fördelaktigt att ha ett större mätningsintervall i värmekameror för säkerhetsövervakning av stora ytor. Därför är fler värmekameror kalibrerade till ett större mätningsintervall. Dock behövs ett mer begränsat mätningsintervall eftersom arbetets syfte handlar om att detektera små temperaturer på ett litet område. Eftersom att temperaturen kommer mätas på människohud begränsas mätningsintervallet till 20-40°C.
Bildframställning genom medelvärdesbildning
Som tidigare nämnt beror värmeutstrålning på emissivitet och temperatur. Temperaturen är inte konsekvent densamma utan kan variera på små temperaturer. Därför tas en sekvens av bilder från samma vinkel. Skillnaden är att en enkel bild innehåller viss mängd brustoppar (spatialt brus) som kan påverka temperaturmätningen samt att temperaturen på ett objekt varierar, dock med små marginaler. En medelvärdesbild bearbetas för att bli av med bruset och få en bättre uppfattning av temperaturen av objektet.
Utförande av experiment
I experimentet observeras högerhänderna på fyra testpersoner. En temperaturmätning utförs på en testpersons högerhand med den kalibrerade värmekameran AXIS Q1942-E. Därefter utförs en likadan mätning av handen med värmekameran AXIS Q2901-E som har inbyggt stöd för temperaturmätning men som inte blivit kalibrerad. Temperaturmätningen sker endast med värmekameror, dvs. utan direkt kontakt med testpersonen. I enlighet med principerna inom kontrollerat experiment kommer testerna ske i en kontrollerad miljö för att minimera antal faktorer utom de valda som får påverka experimentet. De valda faktorerna valdes att vara konstant rumstemperatur och eliminerad vind. Andra felfaktorer som luftfuktighet, varma- och kalla källor som kan påverka testpersonen och antal personer som tillåts vara i testmiljön kommer inte att regleras. Detta eftersom det saknas resurser att integrera dessa försiktighetsåtgärder.
kalibrerad. AXIS Q2901-E används som referenspunkt för att validera att resultaten från AXIS Q1942-E ligger inom samma temperaturområde som en värmekamera med stöd för temperaturmätning. Detta görs för att kontrollera kalibreringen av AXIS Q1942-E och även att ge en antydan om resultatet av kalibreringen avviker från mätningar med AXIS Q2901-E.
5 Resultat
I detta kapitel beskrivs mätning och kalibreringen av värmekameran AXIS Q1942-E. Kapitlet består av flera delar; kommunikationen mellan värmekameran och dator, medelvärdesbildning av värmebilder, modifiering av mjukvara i värmekameran och beräkningar av linjära samband mellan olika temperaturer.
5.1 Värmekameror
5.1.1 AXIS Q1942-E
AXIS Q1942-E (visas i figur 3) är en okyld värmekamera med en bildsensor på 640x480 pixlar och en bildhastighet på upp till 30 FPS [14]. Värmekameran använder våglängdsområdet LWIR och kan mäta objekt med temperaturer från -40 till 550°C [14]. Kameran drivs genom en PoE-anslutning (Power over Ethernet) [14] till ett PoE-kompatibelt nätverksuttag vilket samtidigt möjliggör för kamerans nätverksfunktioner att nyttjas.
Figur 3: AXIS Q1942-E värmekamera
(Källa: https://www.axis.com/images/scaled/300/sites/default/files/q1942-e-left-angle.png)
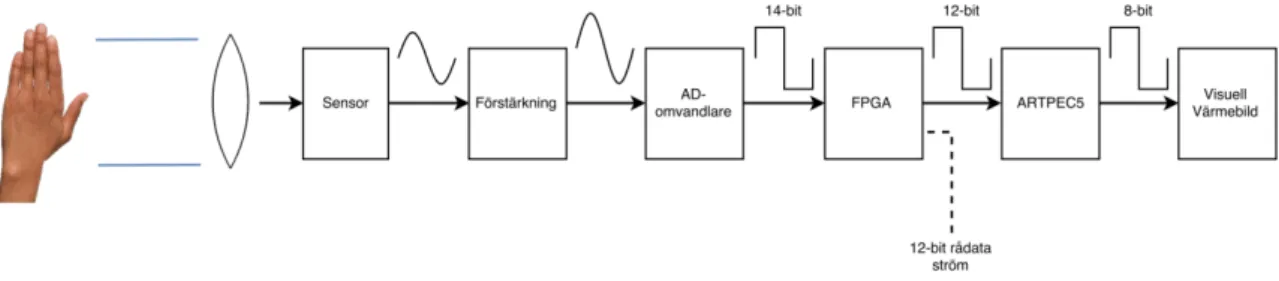
Kameran innehåller två integrerade kretsar för bildbehandling, FPGA och ARTPEC5. FPGA:n i AXIS Q1942-E arbetar med 14-bitars upplösning. FPGA:n filtrerar, utför korrigeringar för optik och signalen omvandlas från 14- till 12-bitar innan den skickas ut [25]. En av korrigeringarna som utförs av FPGA är NUC (Non-uniformity correction).
ARTPEC5 är Axis Communfications egna integrerade krets för bildbehandling i AXIS Q1942-E. Den är en ASIC (application specific integrated circuit) [25] dvs. den är konstruerad för ett specifikt syfte till skillnad från FPGA. Skillnaden är att ARTPEC5 hanterar mest bildbehandling medan FPGA:n hanterar viss bildbehandling men mest signalbehandling och annan logik. ARTPEC5 reglerar egenskaper som skärpa och liknande för bilden. Denna krets omvandlar signalen från 12- till 8-bitars signaler [25, 28].
5.1.2 AXIS Q2901-E
AXIS Q2901-E (visas i figur 4) är en okyld värmekamera med en bildsensor på 336x256 pixlar och en bildhastighet på upp till 8.3 FPS [14]. Värmekameran använder våglängdsområdet LWIR och kan mäta objekt med temperaturer från -40°C till 550°C [14]. Kameran drivs genom en power over ethernet-anslutning (PoE) [14] till ett power over ethernet kompatibelt nätverksuttag vilket samtidigt möjliggör för kamerans nätverksfunktioner att nyttjas. I kameran finns även ett webbgränssnitt för att mäta temperaturer av önskad pixel. Likt AXIS Q1942-E innehåller AXIS Q2901-E också de två integrerade kretsarna FPGA och ARTPEC5 för bildbehandling.
Figur 4: Axis Q2901-E värmekamera
(Källa: https://www.axis.com/images/scaled/300/sites/default/files/q2901-e.png)
5.1.3 Val av värmekameror AXIS Q1942-E och AXIS Q2901-E
Valet av värmekameror baserades främst på tekniska likheter. Värt att notera är att värmekameror från AXIS Q19-serien främst fokuserar på att detektera temperaturskillnader i värmebilder framför faktiska temperaturer. Kameror från AXIS Q29-serien kommer med ett webbgränssnitt för att mäta temperaturer av önskad pixel vilket kameror från AXIS Q19-serien inte gör.
Som tidigare nämnt består båda kameror av bildbehandlingskretsarna FPGA och ARTPEC5. Bildbehandlingsprocesserna i kretsarna skiljer dock mellan värmekamerorna. AXIS Q1942-E levererar både högre bildupplösning och snabbare bildhastighet jämfört med AXIS Q2901-E. AXIS Q1942-E visar en mer högupplöst bild där objeketet som mäts syns tydligare vilket är av nytta i arbetets sammanhang. Gällande linser för värmekamerorna är båda utrustade med 10 millimeters linser. En likhet mellan värmekamerorna, vilket även gäller alla AXIS värmekameror, är att värmekamerorna mäter i våglängdsområdet LWIR.
Baserat på dessa egenskaper valdes dessa kameror med vars ett specifikt syfte. AXIS Q1942-E valdes som värmekamera att kalibrera och använda i arbetet med tanke på att den har bättre bildupplösning än AXIS Q2901-E. Detta är väldigt viktigt eftersom syftet med arbetet är att kunna mäta kroppstemperaturer med en högre noggrannhet än 1 grads variation. Samt att kunna visa data som samlats in från en temperaturmätning genom en väl framställd värmebild. AXIS Q2901-E valdes som värmekamera att validera kalibreringen av AXIS Q1942-E. Detta genom att utföra en sekundär mätning med AXIS Q2901-E. Syftet är att bekräfta att kalibreringen av AXIS Q1942-E resulterar i liknande temperaturer vid mätningar som AXIS Q2901-E som har inbyggt stöd för temperaturmätning.
5.2 Inställning av värmekameran AXIS Q1942-E
För att kunna strömma bilder från värmekameran AXIS Q1942-E krävs att både värmekameran och datorn är anslutna till ett lokalt nätverk. Därför kopplades värmekameran och datorn ihop trådbundet via en PoE-switch. Detta eftersom att kameran drivs av PoE vilket vanliga nätverksportar i datorer saknar stöd för. Kommunikationen mellan värmekameran och datorn sker genom en SSH (Secure Shell) anslutning.
Värmekamerans inbyggda kretsar behandlar signaler i flera steg, förstärker och förskjuter signalen för att kunna presentera en visuellt optimal bildström. Detta påverkar signalens ursprungsvärden vilket gör att det inte går att mäta utifrån dessa värden. Mjukvaran programmerades om till att skicka ut data från FPGA istället för att gå igenom databearbetningen som sker i ARTPEC5. Detta för att den information som är av störst värde är distinkta temperaturskillnader hellre än bilder av bra temperaturkartor. På så sätt blir det lättare att utföra mer precisa mätningar.
Den data som strömmas ut från FPGA:n är digitala värden i 12-bitars upplösning för alla 640x480 pixlar i en tvådimensionell array. Värdena representerar den spänning som sensorn har fångat. En illustration av signalbehandlingsproceduren visas i figur 5.
Figur 5: Signalbehandling i värmekameran
5.3 Hur medelvärdesbildning applicerades
I medelvärdesbildningen adderas ett önskat antal matriser (konverterade från tvådimensionella arrayer) där matriserna representerar signalvärden för alla pixlar på en bild. Därefter beräknas medelvärdet av signalen för varje pixel. Nedan visas ett exempel på en medelvärdesbildning av två matriser. 𝑀1= 2 0 5 1 3 6 3 4 6 𝑀2 = 4 8 7 1 5 4 3 2 2 𝑀1+ 𝑀2 2 = 3 4 6 1 4 5 3 3 4
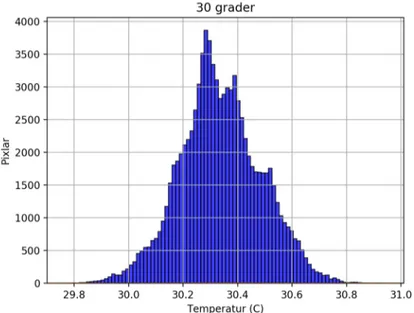
Figurerna nedan visar histogram över vilken temperaturen som ett antal pixlar har vid mätning med värmekameran AXIS Q1942-E av en temperaturkontrollerad svartkropp på 30°C. I figur 6 visas mätdatan för en bild utan medelvärdesbildning och i figur 7 visas mätdatan efter en medelvärdesbildning av 50 bilder.
Figur 6: Mätning på 30°C utan medelvärdesbildning
Histogrammet i figur 6 visar resultatet från en värmebild tagen av en temperaturkontrollerad svartkropp med en temperatur på 30.0°C utan medelvärdesbildning. Här kan man notera en väldigt stor spridning bland värdena på pixlarna. Även en skiftning av vilken temperatur de flesta pixlar hamnar på. Dessa variationer kan bero på felfaktorer som defekta pixlar, ojämn yta av svartkroppen men framförallt temporalt brus. Skiftningen av temperatur de flesta pixlar hamnar på beror på förskjutningen av signalen som sker automatiskt i värmekamerans integrerade kretsar. Det är svårt att utläsa en specifik temperatur bland värdena. De flesta pixlar förhåller sig till en temperatur inom intervallet 30.1–30.6°C. Det är svårt att peka ut en specifik temperatur då spridningen bildar flera toppar inom intervallet 30–30.7°C.
Figur 7: Mätning på 30°C med medelvärdesbildning av 50 bilder
Histogrammet i figur 7 visar resultatet från 50 värmebilder tagen av en temperaturkontrollerad svartkropp med en temperatur på 30°C med medelvärdesbildning. Här kan man notera en betydligt mindre spridning bland värdena på pixlarna. Det är lättare att utläsa en korrelation bland dessa värden.
specifik temperatur. Detta resultat visar att variationer, framförallt brus, kan kompenseras för genom medelvärdesbildning. Det ger en tydligare bild av genomsnittstemperaturen av objektet som mäts.
5.4 Kalibrering av värmekameran AXIS Q1942-E
Värmekameran AXIS Q1942-E mätområde valdes inom intervallet 20–40°C. Kameran kalibrerades genom en två-punktskalibrering inom det valda intervallet tillsammans med en temperaturkontrollerad svartkropp. På detta sätt kan kameran detektera mindre temperaturskillnader eftersom värmekamerans mätområde har begränsats vilket minskar chansen att sensorn reglerar temperaturskillnader utanför det valda intervallet. Kalibreringen utfördes genom att placera kameran 28 cm ifrån svartkroppen för att kunna fånga upp störst möjliga yta av svartkroppen. Eftersom att kameran påverkas av sin omgivningstemperatur och svartkroppen ger ifrån sig en mängd värme kan kameran inte placeras precis intill svartkroppen. Avståndet är även baserat på storleken på linsen. Värmekamerans lins är en 10 millimeters lins, vilket gör att den kan fånga ett brett synfält. Därför behöver avståndet från svartkroppen vara tillräckligt nära för att kameran inte ska fånga signaler från icke önskvärt område och reglera efter signaler utanför svartkroppsytan. Avståndet till svartkroppen bedömdes vara tillräckligt för att värmekameran inte skulle fånga signaler utanför området som ska mätas. Samt att värmen som genereras av den temperaturkontrollerade svartkroppen inte skulle påverka värmekamerans sensortemperatur.
Därefter begränsas det område som ska mätas ytterligare till att endast få med de pixlar som ligger inom svartkroppens yta. Begränsningen av bilden sker genom att utifrån värmekamerans 640x480 pixlar endast välja ut ett område i mitten av svartkroppens yta på 300x300 pixlar (90 000 värden). Detta görs för att endast fånga väsentliga värden för mätningen och minska risken att fånga signalvärden utanför det specifika mätområdet ytterligare.
Värmekameran har flera inbyggda kretsar med mjukvara för bildbehandling. Denna mjukvara och dess processer förstärker och förskjuter signalen för att skapa en så tydlig grafisk värmebild som möjligt. Eftersom arbetets fokus ligger på att kunna mäta precisa temperaturer är det lämpligt att minimera dessa processers påverkan på signalen. På så sätt förhindrar man att dessa funktioner förvränger det ursprungliga digitala värdet för signalen. Förstärkningen reducerades för att kunna behålla det digitala ursprungsvärdet för signalen. Förstärkningen sänktes från 100 till 0 via VAPIX. Det hade även varit optimalt att reducera förskjutningen av signalen för att kunna få konsekventa resultat utan att behöva ta hänsyn till sensorns externa temperatur. Dock visade detta sig inte vara genomförbart. Istället kontrollerades det att förskjutningen hade stabiliserat sig inför varje mätning av svartkroppen. På så sätt kunde värmebilder med ursprungsvärden framställas.
5.4.1 Programkod för kalibrering
Ett program skapades i Python (se bilaga A) för att utföra beräkningar och funktioner för att skapa medelvärdesbilder av värmebilder samt lagra signalvärdena från en medelvärdesbild för varje pixel (90 000 pixlar) i en matris. Medelvärdesbilder skapades genom att ta 50 värmebilder för 20 och 40°C vardera och lagrades i datorn. En linjär beräkning (ekvation 3) användes till att kunna beräkna temperaturen för varje pixel i en värmebild (90 000 pixlar) med hjälp av pixelns signalvärde. Eftersom att alla pixlar i medelvärdesbilderna ger ifrån sig unika signalvärden är det lämpligt att ta fram en riktningskoefficient för varje pixel (ekvation 1) i medelvärdesbilderna. Denna riktningskoefficient representerar den specifika pixelns generella lutning och används till att beräkna
medelvärdesbilden vid 40°C lagrades. Där kan en linjär kurva beräknas mellan dessa vilket resulterar i 90 000 räta linjer.
Genom att använda ekvation 1 där y2 = 40°C, y1 = 20°C, x2 = signalvärdet för pixel a i 40°C
medelvärdesbild och x1 = signalvärdet för pixel a i 20°C medelvärdesbild ges riktningskoefficient k
för pixel a.
(1)
𝑘 =
./0.12/021
k = riktningskoefficient
Förskjutningen av signalen kan beräknas genom räta linjens ekvation efter att ha löst ut m (ekvation 2). Genom att använda ekvation 2 där y2 = 40, k = riktningskoefficient för pixel a och x2 =
signalvärdet för pixel a i 40°C ges förskjutning m för pixel a.
(2)
𝑚 = 𝑦
5− 𝑘𝑥
5m = förskjutning
De uträknade riktningskoefficienterna och förskjutningarna för varje pixel sparas i två separata matriser för användning vid temperaturmätning. Vid en temperaturmätning av en testperson används räta linjens ekvation (ekvation 3) för att räkna ut temperaturen för en specifik pixel med hjälp av signalvärdet från pixeln. Den valda pixelns position i en 300x300 värmebild bestämmer vilken riktningskoefficient och förskjutning som ska användas vid beräkning av temperatur. Genom att använda ekvation 3 där k = riktningskoefficient för pixel a, x = signalvärdet för pixel a i en värmebild och m = förskjutning för pixel a ges temperaturen y för pixel a i en värmebild.
(3)
𝑦
(°𝐶)= 𝑘𝑥 + 𝑚
y = temperatur, x = signal
5.4.2 Validering av kalibrering
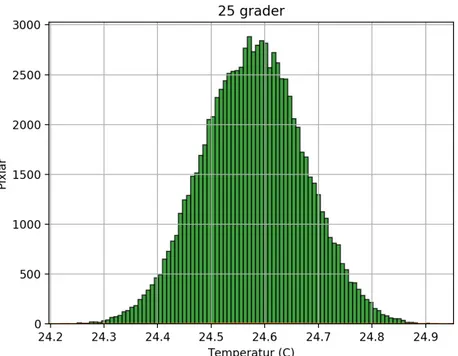
I histogrammen nedan visas mätresultat från den kalibrerade värmekameran AXIS Q1942-E som mätte en temperaturkontrollerad svartkropp vid olika temperaturer. Svartkroppen ställdes in till temperaturerna 25.0, 30.0 och 35.0°C. Mätningarna utfördes för att validera den kalibrerade värmekamerans förmåga att mäta kända temperaturer. Histogrammen nedan presenterar temperaturen i grader Celsius för pixlarna från en 300x300 matris. Notera att det finns ett antal pixlar med större variation av temperatur jämfört med resterande pixlar i varje histogram. Dock är dessa pixlar betydligt få. Detta kan bero på defekta pixlar, brus eller smutsig/defekt yta av svartkroppen som mäts.
Figur 8: Mätning av svartkropp vid 25°C
Från histogrammet i figur 8 kan man utläsa att de flesta pixlar förhåller sig till en temperatur på ungefär 24.6°C med två-punktskalibrering applicerat. Vilket innebär ett fel på 0.4°C. Det går även att konstatera att det finns ett antal pixlar med större variation av temperatur än resterande i histogrammet. Dessa pixlar visar temperaturer på runt 24.3 och 24.8°C.
Figur 9: Mätning av svartkropp vid 30°C
Från histogrammet i figur 9 kan man utläsa att de flesta pixlar förhåller sig till en temperatur på ungefär 30.3°C med två-punktskalibrering applicerat. Vilket innebär ett fel på 0.3°C. Det går även att konstatera att det finns ett antal pixlar med större variation av temperatur än resterande i
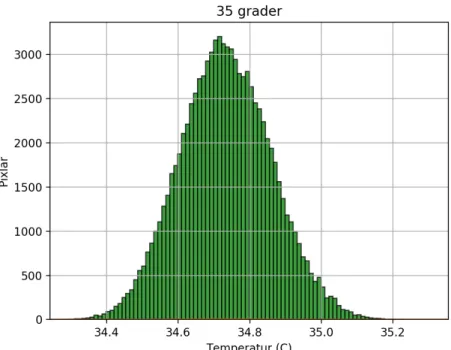
Figur 10: Mätning av svartkropp vid 35°C
Från histogrammet i figur 10 kan man utläsa att de flesta pixlar förhåller sig till en temperatur på ungefär 34.7°C med två-punktskalibrering applicerat. Vilket innebär ett fel på 0.3°C. Det går även att konstatera att det finns ett antal pixlar med större variation av temperatur än resterande i histogrammet. Dessa pixlar visar temperaturer på runt 34.4 och 35.1°C.
I histogrammen 8-10 visar ett antal pixlar större variation av temperatur jämfört med resterande pixlar. Som tidigare nämnt kan avvikelserna bero på defekta pixlar, brus eller smutsig/defekt yta av svartkroppen som mäts.
5.5 Experiment
I detta kapitel beskrivs förberedelser samt mätresultat för experimenten.
5.5.1 Python script
För att presentera värmebild användes biblioteket OpenCV. Eftersom det inbyggda VAPIX-gränssnittet inte har en funktion för att kunna mäta signalvärden från en specifik pixel skrevs ett Python-script för detta. Scriptet känner av muspekarens koordinater i en värmebild. Vid knapptryck kan sedan signalvärdet för pixeln som muspekaren pekar på hämtas. Efteråt hämtas riktningskoefficienten och förskjutningen för pixeln. Genom riktningskoefficienten tillsammans med förskjutningen och signalvärdet för pixeln kan en temperatur beräknas med räta linjens ekvation (ekvation 3).
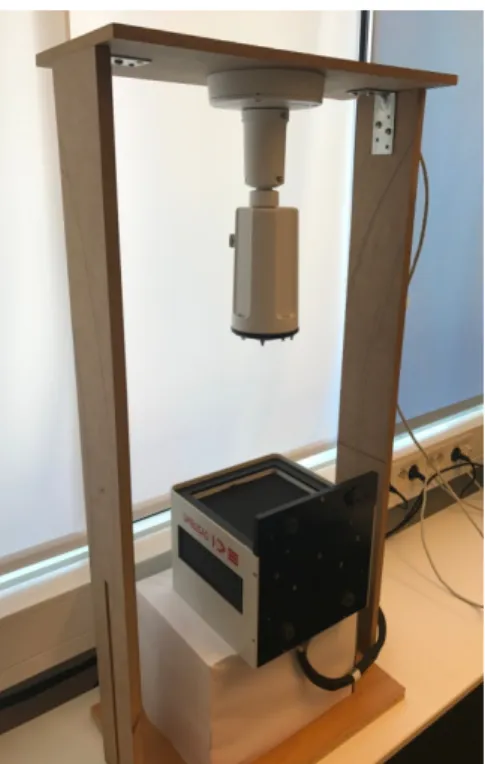
5.5.2 Förberedelser
Mätningar genomfördes på högerhänder av 4 testpersoner. Experimentuppställningen (visas i figur 11) bestod av värmekamerorna AXIS Q1942-E och AXIS Q2901-E, en svartkropp och en testperson. Testpersonens hand placerades över svartkroppen med ett avstånd på 28 cm under värmekameran, dvs. samma avstånd som vid mätningarna av svartkroppen. För att validera mätresultaten från AXIS
testpersonens högerhand med den kalibrerade värmekameran AXIS Q1942-E och en värmebild av samma hand med värmekameran AXIS Q2901-E som inte kalibrerats.
Figur 11: Experimentuppställning
Experimenten utfördes i ett stängt rum för att eliminera felfaktorer som vind och temperaturförändringar i enlighet med principerna för kontrollerat experiment [17]. Innan mätningarna fick värmekameran vara på i 15 minuter för att stabilisera sensortemperaturen. På så sätt kan sensorns externa temperatur stabiliseras mot omgivningstemperatur innan mätning. Detta görs för att den automatiska förskjutningen i värmekameran av signalen inte ska påverka mätningen. För att se till att förskjutningen är stabil övervakas den under mätningarna. Är förskjutningen olika för liknande temperaturer måste värmekameran kalibreras om. Testpersonerna hade varit inomhus i fyra timmar innan experimenten utfördes.
5.5.3 Mätresultat och validering med AXIS Q2901-E
Värmebilderna i figurerna nedan innehåller inte någon förstärkning, därför kan bilderna vara svårtydda (se bilaga B för förtydligade värmebilder).
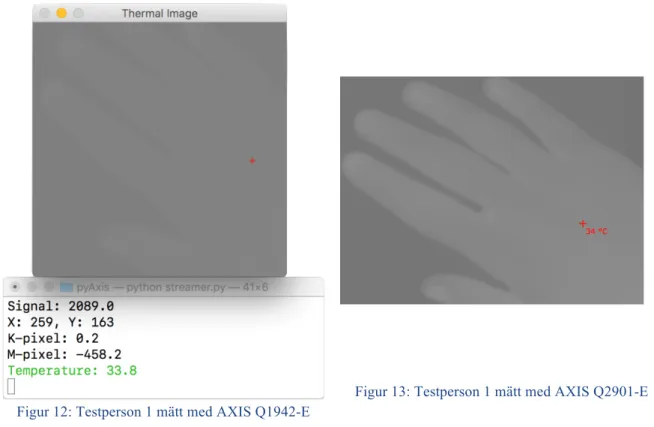
I figur 12 nedan visas en värmebild på första testpersonens högerhand tagen med den kalibrerade värmekameran AXIS Q1942-E. En mätning utfördes på en bestämd pixel som finns markerat med ett rött kors. Utifrån den bestämda pixelns digitala signal beräknades temperaturen. Vid temperaturmätning fångar värmekameran termisk infraröd strålning från ett objekt som omvandlas till en digital signal av värmekamerans integrerade kretsar. Dessa signaler jämförs sedan mot de lagrade riktningskoefficienterna från svartkroppsmätningarna (vid 20 och 40°C) som använts till kalibrering. Utifrån denna jämförelse bestäms sedan vilken riktningskoefficient och förskjutning som ska användas för beräkning av temperatur för erhållen signals digitaltal vid mätning. Temperaturen för pixeln beräknades att vara 33.8°C.
Figur 13: Testperson 1 mätt med AXIS Q2901-E Figur 12: Testperson 1 mätt med AXIS Q1942-E
I figur 14 nedan visas en värmebild på andra testpersonens högerhand tagen med den kalibrerade värmekameran AXIS Q1942-E. En mätning utfördes på en bestämd pixel som finns markerat med ett rött kors. Utifrån den bestämda pixelns digitala signal beräknades temperaturen. Temperaturen för pixeln beräknades att vara 31.7°C.
Figur 15 nedan visar en värmebild tagen med den icke-kalibrerade värmekameran AXIS Q2901-E. Temperaturen som mättes utfördes på samma del av handen. Temperaturen beräknades att vara 32°C.
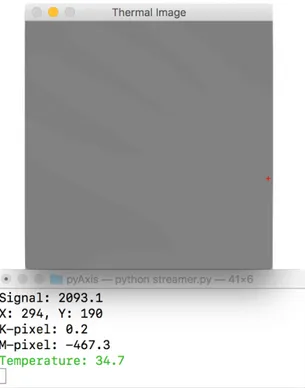
I figur 16 nedan visas en värmebild på tredje testpersonens högerhand tagen med den kalibrerade värmekameran AXIS Q1942-E. En mätning utfördes på en bestämd pixel som finns markerat med ett rött kors. Utifrån den bestämda pixelns digitala signal beräknades temperaturen. Temperaturen för pixeln beräknades att vara 34.7°C.
Figur 17 nedan visar en värmebild tagen med den icke-kalibrerade värmekameran AXIS Q2901-E. Temperaturen som mättes utfördes på samma del av handen. Temperaturen beräknades att vara 35°C.
Figur 17: Testperson 3 mätt med AXIS Q2901-E Figur 16: Testperson 3 mätt med AXIS Q1942-E
I figur 18 nedan visas en värmebild på fjärde testpersonens högerhand tagen med den kalibrerade värmekameran AXIS Q1942-E. En mätning utfördes på en bestämd pixel som finns markerat med ett rött kors. Utifrån den bestämda pixelns digitala signal beräknades temperaturen. Temperaturen för pixeln beräknades att vara 30.7°C.
Figur 19 nedan visar en värmebild tagen med den icke-kalibrerade värmekameran AXIS Q2901-E. Temperaturen som mättes utfördes på samma del av handen. Temperaturen beräknades att vara 31°C.
Figur 19: Testperson 4 mätt med AXIS Q2901-E Figur 18: Testperson 4 mätt med AXIS Q1942-E
Det erhållna resultatet från mätningarna på de fyra testpersonerna redovisas i tabell 1 nedan. I tabellen redovisas temperaturen som mättes på varje testperson med kamerorna AXIS Q1942-E och AXIS Q2901-E och temperaturskillnaderna av kamerornas mätvärden i grader Celsius samt procentuellt.
Temperaturskillnad (°C) Temperatur mätt med AXIS Q2901-E (°C) Temperatur mätt med AXIS Q1942-E (°C) Test- person 0.3 32 31.7 1 0.2 34 33.8 2 0.3 35 34.7 3 0.3 31 30.7 4
Utifrån det erhållna resultatet från experimentet sammanställdes ett diagram (se figur 20) med temperaturskillnaderna mellan värmekameran AXIS Q1942-E och AXIS Q2901-E för varje testperson. Värmekameran AXIS Q1942-E kan mäta temperaturer med ett fel på minst 0.6°C mindre än en värmekamera med en förprogrammerad funktion för temperaturmätning (AXIS Q2901-E).
6 Analys
6.1 Analys av experimentuppställning och experimentmiljö
Likt S. N. Torres et al. [26] använde vi två-punktskalibrering genom att ta bilder av en svartkropp vid två kända temperaturer. För optimala bilder krävs en jämn svartkroppsyta, eftersom att det är tillverkat av känsligt material kan det lätt bli defekt och påverka mätvärdena. I vårt fall var ytan inte helt jämn. Ojämnheten på ytan speglas även i histogrammen där ett fåtal pixlar visar ett värde långt ifrån den kända temperaturen och är därmed sannolikt defekta.
Eftersom att kamerans mätvärden är beroende av sensortemperaturen kan svartkroppens placering ha påverkat dessa. Svartkroppen placerades under kameran och eftersom att den avger värme som i sin tur stiger uppåt påverkar detta sensortemperaturen. Vi åtgärdade detta problem genom att ha svartkroppen avstängd då mätningar ej gjordes.
Då svartkroppen som användes endast tog upp ungefär hälften av bilden som värmekameran fångade upp kunde inte en kalibrering göras på alla pixlar. Det beror på att svartkroppsytan inte var tillräckligt stor för att fylla ut hela bilden. Omgivningen som ungefär består av andra hälften av bilden togs med på bilderna och har haft en påverkan på kalibreringen. Då värmekamerans mätdata främst är beroende av skillnaderna i en omgivning har experimentuppställningen fått vara placerad på samma plats för att inte påverka resultatet. Ifall en större svartkropp hade varit tillgänglig hade alla pixlar kunnat kalibreras samt att vi hade kunnat mätt och analyserat större kroppsdelar.
Precis som S. Bagavathiappan et al. [15] utfördes experimentet i en isolerad miljö där felfaktorer som vind och kontakt med testpersonerna eliminerades i enlighet med vår metod [17]. Detta visade sig vara en lyckad metod då yttre påverkan på resultatet minimerades. Dock medförde denna metod en nackdel. Eftersom vi befann oss i ett isolerat rum med minimerad lufttillförsel (ingen luftkonditionering) steg temperaturen i rummet med tiden. Detta påverkade mätningarna markant på grund av känsligheten på förskjutningen. En liten skillnad i omgivningstemperatur förändrade värdet i förskjutningen direkt. Förskjutningen beräknas automatiskt efter sensorns temperatur av de inbyggda kretsarna i värmekameran. Därför var det svårt att göra likvärdiga mätningar över en längre period. Ju längre vi befann oss i rummet desto större risk blev det att temperaturen ökade. Detta problem påverkade resultatet ständigt eftersom att kalibreringen av värmekameran är utförd i en viss omgivningstemperatur. Ändras denna kommer resultatet vara missvisande. Dock användes denna metod ändå eftersom alternativet hade varit att antingen ha dörren till rummet öppet eller ha igång luftkonditionering. Detta hade kunnat resulterat i större variationer i både kroppstemperatur och omgivningstemperatur.
6.2 Analys av testpersoner
Testpersonerna som analyserats hade innan mätningarna haft liknande arbetssysslor och anses därför ha haft lika förutsättningar för mätningarna. I mätningarna kan dock en tydlig skillnad ses på fingrarna på testperson fyra (se figurer 18, 19). Testpersonen visar positivt till Raynauds syndrom vilket syns på temperaturen som avtar mot fingertopparna.
6.3 Analys av resultat
6.3.1 Analys av kalibrering
Problemet med förskjutningen och sensorns temperatur kan även bero på vår metod att kalibrera kameran. Som beskrivet tidigare i metod- och resultatkapitlet (se kapitel 4 och 5) utförde vi kalibreringen först och experimenten därefter. Detta kräver att omgivningstemperaturen håller sig konstant för att åstadkomma rättvisande resultat. Dock var detta ett bekymmer eftersom vi noterat flera variationer i förskjutningen av signalen vid mätningarna. Trots kalibrering och kompensering för felfaktorer kunde vi inte åstadkomma en mer noggrann temperaturmätning än med en variation på 0.2–0.4 °C. Dessa berodde på den automatiska förskjutningen av signalen i värmekamerans integrerade kretsar i samband med viss variation av rumstemperatur.
Värmekamerans fokusområde är begränsat till ett intervall mellan 20–40°C eftersom en hands temperatur generellt sett bör ligga inom detta intervall. Trots detta kan det medföra en risk att en testperson har en temperatur utanför detta intervall. Detta kan lösas genom att generera fler medelvärdesbilder för olika temperaturer utanför det valda intervallet. Dock valde vi att innan experimentet endast generera och använda referensvärden från två matriser med signalvärden från pixlarna i medelvärdesbilder tagna på en temperaturkontrollerad svartkropp vid 20 och 40°C. Vi valde detta med tanke på att vi endast skulle utföra mätningar på fyra testpersoner och att dessa hade lika bra förutsättningar och förberedningar inför mätningen.
6.3.2 Analys av medelvärdesbildning
Resultatet av medelvärdesbildning (se figurer 6, 7) presenterar skillnaden av en mätning med och utan medelvärdesbildning applicerat. I figur 6 syns ett histogram med tre toppar, topparna har sitt ursprung främst från sensortemperaturen och ojämnheten på svartkroppsytan. Vid variation i omgivningstemperaturen förekom variation av sensortemperaturen som i sin tur påverkade mätsignalen. Som beskrivet i avsnitt 6.1 tillförde en ojämn svartkroppsyta fel mätvärden för en del pixlar. Medelvärdesbildningen som appliceras i figur 7 har jämnat ut histogrammet med tre toppar till en jämn kurva. Detta medför dock även att många av pixlarnas värde kan förändras (i förhållande till deras urpsrungsvärden) på grund av en medelvärdesbildning. Fördelen är att man avgränsar det breda området som pixlarnas värde sträckte sig över innan medelvärdesbildningen. Genom medelvärdesbildningen är det lättare att avgöra inom vilket intervall temperaturen, av objektet som mäts, rör sig inom. Visserligen kan man tro att ursprungsvärdena är att föredra framför ett medelvärde men i en värmebild påverkas mätningen av spatialt brus. Därför blir ursprungsvärdena inte särskilt pålitliga när det gäller att avgöra en precis temperatur av ett objekt som mäts. Detta är viktigare för oss eftersom vi endast försöker förbättra värmekamerans förmåga att mäta mindre temperaturskillnader än vad som går med en icke-kalibrerad värmekamera.
6.3.3 Analys av jämförelse med AXIS Q2901-E
I avsnitt 5.5.3 ser vi mätresultaten för de fyra testpersonerna med värmekameran AXIS Q1942-E och AXIS Q2901-E. Eftersom att AXIS Q2901-E endast kan avläsa temperaturer på bestämd pixel kunde inga andra jämförelser göras mellan kamerorna än att validera att vår kalibrering av AXIS Q1942-E mätte inom liknande temperaturer som AXIS Q2901-E. Eftersom att AXIS Q2901-E har en inbyggd funktion för att mäta temperaturer i hela grader kunde denna användas som riktlinje för vår
Skillnaden är att AXIS Q1942-E är kalibrerad att kunna mäta mindre temperaturskillnader vilket visas i figurerna. Differensen mellan mätningarna ligger på ca 0.2–0.4°C. I diagrammet över temperaturskillnaderna mellan värmekamerorna (se figur 20) kan vi avläsa att värmekameran som inte blivit kalibrerad alltid förhåller sig till en avrundad temperatur av den temperaturen som har mätts med den kalibrerade värmekameran. Detta innebär att kalibreringen av värmekameran AXIS Q1942-E kan mäta temperaturer och att dess felmarginal är minst 0.6°C mindre än en värmekamera med en förprogrammerad funktion för temperaturmätning. Detta då testmätningarna med AXIS Q1942-E av svartkroppen vid 25, 30, och 35°C visade på en felmarginal på högst 0.4°C jämfört med AXIS Q2901-E (som endast mäter i hela grader och därmed har en felmarginal på högst 0.99°C).
7 Diskussion
Studiens syfte var att undersöka huruvida högre noggrannhet i temperaturmätningar kan uppnås med en värmekamera samt vilken teknik som skulle vara lämplig. Baserat på vår teori (se avsnitt 4.2.1) var vår hypotes att en högre noggrannhet kan uppnås genom att kompensera för externa faktorer som elektriska fluktuationer (brus), sensorns externa temperatur och förskjutning. Vi anser att vår lösning levererar tillräckliga resultat för att besvara frågeställningarna. Från att inte alls kunna mäta temperaturer i grader Celsius till att åstadkomma en funktion för att beräkna temperatur för specifik pixel. Samt att kompensera för felfaktorer som till exempel brus och på så sätt åstadkomma en noggrannhet vid temperaturmätning av 0.2–0.4°C. Enligt resultatet kan vi notera att en högre nivå av noggrannhet har uppnåtts genom att kalibrera värmekameran till att kompensera för externa felfaktorer som kan påverka mätningarna negativt. Lösningen är inte optimal. Detta beror på felfaktorer som påverkar sensortemperaturen vilket i sin tur påverkar mätdatan. Vidare i detta kapitel diskuteras experimentuppställningen, experimentmiljön, kalibreringen samt mätresultatet.
7.1 Experimentuppställning och experimentmiljö
Vid val och uppsättning av experimentmiljö tog vi hänsyn till principerna inom kontrollerat experiment [17]. Eftersom att den största faktorn som kan påverka förändringar i omgivningstemperatur ansågs vara vind bestämde vi att utföra experimentet i en isolerad miljö där vindfaktorn eliminerades likt S. Bagavathiappan et al. [15]. Vad som bör tas i åtanke är att eftersom vi ströp lufttillförseln till rummet började omgivningstemperaturen stiga långsamt ju längre testpersonerna och forskarna befann sig i rummet. Detta visade sig påverka kamerasensorns temperatur vilket resulterade i att en variation uppstod i mätningarna. Denna variation uppstår när omgivningstemperaturen är olik den omgivningstemperaturen vid kalibreringsmätningarna av svartkroppen.
Det hade varit väldigt intressant att se hur resultatet hade påverkats i en mer optimal experimentmiljö där omgivningstemperaturen reglerades bättre. Till exempel att man utförde temperaturmätningarna av testpersonerna i ett rum som inte var helt luftisolerat, utan möjliggör ventilation samtidigt som omgivningstemperaturen regleras till att hålla samma temperatur konstant. Med mer strikt kontroll på vilka faktorer i experimentmiljön som tilläts påverka testpersonerna eller värmekameran hade möjligtvis validiteten på resultaten kunnat höjas. Exempel på dessa faktorer är luftfuktighet och varma eller kalla källor som S. Bagavathiappan [15] skriver.
7.2 Kalibrering
Metoderna och teknikerna för att kalibrera en kamera togs från liknande projekt från olika forskningsarbeten. Dessa visade sig vara väldigt användbara med avseende för korrigering av variationer av signalvärde, elektriska fluktuationer och andra felfaktorer som kan påverka experimentet.
Likt S. N. Torres [26] och P. Goyal [1] utfördes två-punktskalibrering med en svartkropp som likformig temperaturkälla för att använda som referens vid andra mätningar. Eftersom att svartkroppen vi använde inte täckte värmekamerans alla pixlar kunde inte alla pixlar kalibreras. Detta hade kunnat åtgärdas genom att använda en lins med längre fokallängd eller en svartkropp med större yta.
Från resultatet (se figurer 6, 7) kan man även utläsa att genom medelvärdesbildning kan man erhålla en bättre bild av genomsnittstemperaturen i en värmebild. Precis som M. Burton [1] visar att bilder av ansikten efter medelvärdesbildning är lättare att känna igen är det lättare att peka ut en specifik temperatur i en värmebild efter medelvärdesbildning.
Det hade dock kunnat gynna arbetet med en annan metod för att kalibrera värmekameran. Vi utförde punktskalibrering på svartkroppen. Utifrån värdena som lagrades vid två-punktskalibreringen testades kameran genom provmätningar av svartkroppen vid 25.0, 30.0, och 35.0°C för att utvärdera kalibreringen och sedan utfördes experimentet. Istället hade man kunnat till exempel utföra kalibreringen och experimenten samtidigt. Med utgångspunkt att en hands temperatur generellt befinner sig runt 33–34°C hade man kunnat utföra en svartkroppsmätning på 20°C. Därefter en annan på 25 och 30°C för att sedan göra en mätning på en hand och till sist slutföra kalibreringen på 35 och 40°C. Genom att utföra kalibrering parallellt med experimenten skulle risken att omgivningstemperaturen stiger och påverkar resultatet minimeras. Detta eftersom kalibreringen och experimenten är utförda under hyfsat lika förutsättningar och är nära varandra tidsmässigt. Problemet här är dock att detta kan resultera i att resultaten riskerar att inte vara reliabla då kalibreringen inte är utförd och färdigställd innan experimenten påbörjas.
Trots detta valdes metoden för att kalibrera värmekameran med respekt för arbetets syfte vilket är att hitta metoder och tekniker som kan användas för kalibrering av värmekamera. Det vill säga, de metoder som använts i tidigare studier (se tex [1, 19, 26]) bedöms vara lämpliga att använda.
7.3 Mätresultat
Från mätresultatet (se avsnitt 5.5.3) avläses temperaturmätningar med värmekamerorna AXIS Q1942-E och AXIS Q2901-Q1942-E. Likt S. N. Torres [26] reduceras förstärkningen på värmebilderna. Skillnaden här är att vi inte kunde reducera förskjutningen av signalen i värmekameran. En reducering av förskjutningen hade kunnat gynna resultatet men var inget vi kunde ändra i värmekameran. Detta på grund av att förskjutningen hanteras i en del av kameran som inte är tillgänglig för omprogrammering. Eftersom förskjutningen inte kunde reduceras och hanteras därför automatiskt av värmekameran leder detta till att bilderna som tas vid mätningar blir svårtydda. Trots detta prioriterades inte en förbättring av bilden eftersom att mätvärdena var viktigare än kvaliteten på värmebilden.