Sensorsystem
för insamling av
kördata
Ett konceptsystem
HUVUDOMRÅDE: Maskinteknik, Produktutveckling & Design FÖRFATTARE: Axel Augustsson, Oscar Forsling
HANDLEDARE:David Samvin
Detta examensarbete är utfört vid Tekniska Högskolan i Jönköping inom maskinteknik, produktutveckling & design. Författarna svarar själva för framförda åsikter, slutsatser och resultat.
Examinator: Olof Granath Handledare: David Samvin Omfattning: 15 hp (grundnivå)
Abstract
A sensor solution needs to be developed that can help JU Solar Team collect data acquired from driving. This project is intended to create the basis for more realistic car simulations, both static and dynamic. The research is done at Jönköping School of Engineering.
The research involves tests and programming off a selection of both independently and interconnected sensors and circuit boards.
The results of the research show that a battery-powered device can be produced that can continuously measure and store data for 24 hours from the accelerometer, gyroscope, air quality sensor and load cells. The combination of low weight and compact size of the system means it does not interfere with the driver during competition and also provides the ability to integrate the system as a permanent part of the solar car in the future.
The research is restricted to assessing the feasibility of developing a concept system that is intended to lay the foundation for further development by future students.
Sammanfattning
Det finns ett behov av att utveckla en sensorlösning som kan bidra JU Solar Team med kördata från körning. Detta för att skapa underlag för mer verklighetstrogna statiska och dynamiska simuleringar av bilen. Arbetet har utförts vid Jönköpings Tekniska Högskola.
I studien ingår utförda experiment samt programmering av ett flertal diverse sensorer och kretskort, både individuellt och sammansatt kopplade.
Resultatet från arbetet visar att det är möjligt att skapa ett batteridrivet system som kan mäta samt lagra data från accelerometer, gyroskop, luftkvalitetssensor och lastceller oavbrutet under 24 timmar. Systemets kombination av lågt vikt och kompakt storlek gör att det inte stör föraren under tävling och skapar möjlighet att i framtiden bygga in systemet som en permanent del av solbilen.
Studien avgränsar sig till att utvärdera möjligheten för att skapa ett konceptsystem som är tänkt att lägga grunden för vidareutveckling av framtida studenter.
Innehållsförteckning
1
Introduktion ... 1
1.1 BAKGRUND ... 1
1.2 PROBLEMBESKRIVNING ... 1
1.3 KRAVSPECIFIKATION ... 2
1.4 SYFTE OCH FRÅGESTÄLLNINGAR ... 3
1.5 AVGRÄNSNINGAR ... 3
1.6 DISPOSITION... 3
2
Teoretiskt ramverk ... 4
2.1 KÖRTEST INOM BILINDUSTRIN ... 4
2.2 HÅRDVARA INOM KÖRTESTER... 4
2.3 ENKORTSDATORER ... 5
2.4 GRUNDLÄGGANDE ELEKTRONIK ... 8
2.5 LAGRINGSFORMAT ... 15
2.6 LAGRINGSMEDIA ... 18
3
Metod ... 19
3.1 VIKTNING AV ENKORTSDATORER I PUGHS MATRIS... 19
3.2 VIKTNING AV TECKENKODSFORMAT I PUGHS MATRIS ... 20
3.3 UPPSKATTNING FÖR BEHOV AV LAGRINGSKAPACITET ... 21
3.4 BESLUTSPROCESS VID VAL AV SYSTEMETS RESTERANDE KOMPONENTER ... 22
4
Genomförande och resultat ... 23
4.1 HUR UTFÖR BILINDUSTRIN TESTER FÖR ATT FÅNGA UPP EFFEKTER AV KÖRNING? ... 23
4.2 VILKEN HÅRDVARA KRÄVS FÖR ATT MÖTA KRAVEN SOM HAR STÄLLTS I KRAVSPECIFIKATIONEN? ... 23
4.21 RESULTAT FRÅN BERÄKNING FÖR BEHOV AV LAGRINGSKAPACITET ... 30
4.22 RESULTAT FRÅN BERÄKNING FÖR BEHOV AV LAGRINGSKAPACITET I ETT AVANCERAT SYSTEM 30 4.23 RESULTAT FRÅN INDIVIDUELLT KOPPLADE SENSORER ... 30
4.26 BATTERI- OCH DRIFTTEST... 40
4.27 KAN ETT SYSTEM SOM SAMLAR IN RELEVANT DATA KONSTRUERAS? ... 40
4.28 VILKET FORMAT AV DATAN GER BÄST LAGRINGSMÖJLIGHET MED HÄNSYN TILL PRESTANDA OCH LAGRINGSKAPACITET? ... 40
5
Analys ... 41
5.1 HUR UTFÖR BILINDUSTRIN TESTER FÖR ATT FÅNGA UPP EFFEKTER AV KÖRNING? ... 41
5.2 VILKEN HÅRDVARA KRÄVS FÖR ATT MÖTA KRAVEN SOM HAR STÄLLTS I KRAVSPECIFIKATIONEN? ENKORTSDATOR ... 41
5.3 VILKET FORMAT AV DATAN GER BÄST LAGRINGSMÖJLIGHET MED HÄNSYN TILL PRESTANDA OCH LAGRINGSKAPACITET? ... 44
6
Diskussion och slutsatser ... 45
6.1 IMPLIKATIONER ... 45
6.2 SLUTSATSER OCH REKOMMENDATIONER ... 45
6.3 BEGRÄNSNINGAR ... 45
6.4 VIDARE ARBETE ELLER FORSKNING ... 45
1
Introduktion
Jönköpings University har i ett flertal år deltagit i World Solar Challenge som äger rum i Australien. Ett race från Darwin till Adelaide med en sträcka på över 300 mil. Bilen som körs drivs av solenergi och är byggd av studenter.
Vartannat år byggs en ny bil från grunden, där finns dock mycket potential till utveckling. Att hitta ett sätt att samla in och dokumentera data från varierande körning ger möjligheten till framtida års Solar Team att börja byggandet med grundläggande information om de krafter bilen utsätts för. Denna data kan i sin tur användas för att förbättra bilens design och
konstruktion. Huvuduppgiften med projektet kommer vara att ta fram en lösning för att mäta effekter av varierande körning på solbilen.
1.1 Bakgrund
Solbilsprojektet är ett stort projekt som ger högskolan och företag i Jönköping ett sätt att arbeta tillsammans. Projektet skapar en god relation mellan studenter och näringslivet vilket i sin tur kan hjälpa studenter att komma in i arbetslivet. Eftersom solbilen deltar i en tävling är målet att hela tiden hitta nya sätt att förbättra och utveckla bilen. Långsiktigt är tanken med arbetet att det ska lägga grunden för framtida studenter som kommer arbeta med utveckling av bilens chassi.
1.2 Problembeskrivning
Solbilen byggs vartannat år om på nytt, det finns mängder med data och lärdomar att hämta från tidigare år, som kan hjälpa i konstruktionen av nästa generations solbil. Målet är att varje ny generation av bilen ska bygga på kunskaper från föregående tävling. Det som saknas idag är en lösning för att samla in kördata som i sin tur kan användas för att utföra statiska och dynamiska simuleringar av bilen. I dagsläget har det endast gjorts relativt enkla beräkningar och simuleringar som inte är baserade på verklig kördata.
1.3 Kravspecifikation
Examensarbetet kommer utföras och anpassas efter en från JU Solar Team tilldelad kravspecifikation, där ett antal nödvändiga krav har ställts på systemet:
• Systemet skall erhålla data från töjningsgivare, accelerometer, gyroskop och GPS för användning i statiska och dynamiska simuleringar av chassit.
• Systemet bör erhålla data från en luftkvalitetssensor för att mäta temperatur, lufttryck och luftfuktighet.
• All data skall lagras med tidsstämpel.
• Systemet skall hantera insamling av data under ett helt dygn utan avbrott. • Systemet skall kunna sammankoppla data från accelerometer och GPS.
• Samtliga sensorer skall vara kopplade på ett sätt som enkelt visar vilken som är aktiv/inaktiv. En lösning med lysdiod (röd/grön) bör räcka.
• Strömförsörjning skall ske med LiPo eller Li-ion batterier.
• Systemet bör vara strömsnålt då inget byte av batterier bör ske under 24 timmar. • Lagring bör vara tillräcklig för att hantera all data som lagras under 24 timmar. • Sensorer skall vara utbytbara.
• Systemet skall inte vara ett hinder för föraren med hänsyn till placering och storlek. • Systemet skall uppfylla reglerna för World Solar Challenge 2019.
1.4 Syfte och frågeställningar
Syftet med arbetet är att skapa ett konceptsystem för att mäta effekter av varierande körning på en bil. Arbetets syfte är även att bidra med ett redskap till JU Solar Team och lägga en grund för vidare utveckling inom området. Målet är att projektets lösning ska användas i framtida solbilar och att framtida team ska ha nytta av arbetet.
Därmed är studiens frågeställningar:
[1] Hur utför bilindustrin tester för att fånga upp effekter av körning? a. Finns det något standardiserat arbetssätt?
b. Vilken hårdvara används?
[2] Vilken hårdvara krävs för att möta kraven som har ställts i kravspecifikationen? a. Kan ett system som samlar in relevant data konstrueras?
[3] Vilket format av datan ger bäst lagringsmöjlighet med hänsyn till prestanda och lagringskapacitet?
1.5 Avgränsningar
Projektet kommer inriktas mot datainsamling från varierande körning. Det finns certifikat och standardtester som utförs på bilar inom bilindustrin som kommer skapa inspiration för arbetet. Projektet tar inte hänsyn till systemets infästning, placering i sobilen, mekaniken i solbilen eller klimatet som solbilen utsätts för.
Systemet som utvecklas behöver inte vara komplett. Tyngden ligger i att skapa ett fungerande system där det finns minst en sensor av varje kategori i form av töjningsgivare, accelerometer och GPS.
1.6 Disposition
Rapporten börjar med en teoretisk bakgrund som lägger grunden för resten av rapporten följt av ett metodavsnitt där rapporten går igenom hur komponenterna valdes ut från den stora mängden som fanns tillgängligt. Detta följs av resultatdelen som berättar vad för slutsatser som drogs från metoddelen samt resultat från det fysiska arbetet. Resultaten analyseras och diskuteras därefter i avsnitten analys och diskussion. Rapporten avslutas med en referenslista. I slutet av rapporten inkluderas en installationsguide via en bilaga. Guiden är gjord för att systemet enkelt ska kunna replikeras av personer som är intresserade av att använda eller vidareutveckla det. Guiden inkluderar kopplingsscheman, kod och referenser.
2
Teoretiskt ramverk
2.1 Körtest inom bilindustrin
Inom bilindustrin finns det flera slags standardiserade tester för lastfall som i princip alla biltillverkare jobbar efter. Ett av dessa tester består av att testa fjädringen och hjulupphängningen i tuffa miljöer. Dessa miljöer består av testanstalter och konstgjorda vägar som är konstruerade för att återskapa de värsta förhållandena en bil kan tänkas utsättas för. Målet med testerna är att undersöka om bilen är tillräckligt robust byggd för att fungera under långsiktigt körande. Testerna utförs i repetition för att säkerställa bilens konstruktion över tid. Ett kullerstenstest utfört av Toyota Motor Corporation kan ses i [28]. Vägguppen är placerade i tät följd för att koncentrera testet och minimera tiden det tar att utföra det. Dessa tester upprepas i den mängd som man anser motsvarar vad bilen utsätts för under sin garantitid, inklusive marginal. Dessa typer av tester varierar en del mellan olika bilföretag beroende på vilka krav tillverkaren sätter, vissa företag har strängare krav än andra.
2.2 Hårdvara inom körtester
Ford använder sig av specialanpassade hjul som under körning har möjligheten att samla upp data i tre dimensioner, se [29]. I Figur 1 kan man se hur amplituden i grafen ökar när fordonet kör över ett gupp. Högre amplitud motsvarar större krafter som ett fordon utsätts för. De tillfällen där fordonet utsätts för de största accelerationerna/krafterna motsvaras av hög amplitud medan låg amplitud motsvarar en plan väg.
Ford använder ett system som är anpassat för större bilar där bagageutrymme finns tillgängligt, se [29]. Liknande process och system används av andra biltillverkare. Denna information ger en indikation på vad för hårdvara som skulle kunna användas för att besvara arbetets frågeställningar.
Ford använder en snarlik testanstalt som Toyota Motor Corporation, som kan ses i [29]. Arbetsprocessen för ett flertal andra tillverkare har undersökts. Dessa tillverkare inkluderar Porsche, Volvo, Chevrolet och Opel med flera, se [30], [31] och [32]. Tillverkarna använder sig utav väldigt snarlika processer.
2.3 Enkortsdatorer
Raspberry Pi 4 är en enkortsdator som blivit väldigt populär inom hobbybranschen, se Figur 2. Denna enkortsdator har en stor användarbas och det finns mycket guider kring den dokumenterat på internet. Fördelen med denna enkortsdator är att den i princip fungerar som en väldigt liten stationär dator. Den har fyra stycken inbyggda USB portar vilket möjliggör anslutning av exempelvis mus och tangentbord. Den har även inbyggt Wi-Fi och Bluetooth 5.0 [6]. Raspberry Pi 4 kräver ett operativsystem för att drivas, detta system lagras på ett SD kort. En Raspberry Pi 4 drar 2.85 watt under viloläge vilket för referens skulle innebära att ett batteri på 3000 mAh skulle bli helt urladdat efter ungefär fyra timmar [11]. Energiförbrukningen ökar dessutom beroende på hur hårt kortet behöver arbeta.
Nedan visas den fysiska storleken samt vikten för Raspberry Pi 4, se Tabell 1.
Enkortsdator Storlek Vikt
Raspberry Pi 4 85mm x 56mm 46 g
Tabell 1. Storlek och vikt för Raspberry Pi 4 [6].
Arduino Uno är en annan enkortsdator som till synes ser väldigt lik ut Raspberry Pi 4, se Figur 3. Det finns dock flera stora skillnader i hur denna dator fungerar. Arduino Uno kräver till skillnad från Raspberry Pi 4 inte något operativsystem. Detta gör enheten mer lämplig till vissa användningsområden och mindre till andra. Fördelen med detta är att kod kan laddas upp till datorn som sedan körs direkt när enheten startar [5]. Koden finns sedan kvar på datorn även efter strömförlust och kommer köras direkt så fort ström ansluts. Arduino Uno har till skillnad från Raspberry Pi 4 färre anslutningsportar och saknar exempelvis USB portar [43].
Nedan visas den fysiska storleken samt vikten för Arduino Uno, se Tabell 2.
Enkortsdator Storlek Vikt
Arduino Uno 68.6mm x 53.4mm 25 g
Tabell 2. Storlek och vikt för Arduino Uno [43].
STM32 Black Pill är mindre till storleken än både Raspberry Pi 4 och Arduino Uno, se Figur 4. STM32 Black Pill har en energiförbrukning vid viloläge som endast är en tusendel så stor som Raspberry Pi 4 enligt [11]. Detta är även lägre än energiförbrukningen hos Arduino Uno. STM32 Black Pill kräver inget operativsystem för att drivas [34]. Denna enkortsdator riktar sig till mer professionella användare jämfört med Raspberry Pi 4 och Arduino Uno. En betydande skillnad med detta kort är exempelvis de gula anslutningsstiften som behöver lödas fast manuellt, se Figur 4. Detta skapar direkt ett krav på en lödstation för att kunna använda systemet. Sett till prestanda är denna dator den svagaste bland de tre alternativen.
Nedan visas den fysiska storleken samt vikten för STM32 Black Pill, se Tabell 3.
Enkortsdator Storlek Vikt
STM32 Black Pill 57mm x 25mm 7 g
Tabell 3. Storlek och vikt för STM32 Black Pill [34].
Figur 4. STM32 Black Pill. Mindre till storlek jämfört med både Raspberry Pi 4 och Arduino Uno [44].
För att utvärdera de tre enkortsdatorerna på ett objektivt sätt togs beslutet att använda viktning via Pughs matris, se Tabell 10. Detta för att få fram det optimala kortet för systemet. Pughs matris är en objektiv metod gjord för att på ett systematiskt sätt välja den mest lämpade lösningen bland flera alternativ. Metoden innebär att de olika alternativen jämförs i en tabell där alternativens egenskaper poängsätts. Egenskaperna kan i sin tur vid behov viktas för att lägga en större tyngd på viktigare aspekter. Genom att jämföra alternativ via den här metoden reduceras möjligheten att göra subjektiva val efter egna preferenser.
2.4 Grundläggande elektronik
Kopplingsdäck & PCB experimentkort
För att experimentera och bygga prototyper av elektriska system finns det två typer av kopplingskort som kan användas för att koppla ihop exempelvis ett STM32 kort tillsammans med ett par LED-lampor. Den första varianten är kopplingsdäck, även kallat breadboard, se Figur 5. Denna typ av däck är skapad för experimenterade eller tidiga prototyper och gör det möjligt att ansluta kretskort och sladdar snabbt och smidigt genom att föra ner dom i hålen. Kopplingsdäcken finns tillgängliga i en mängd olika storlekar.
Figur 5. Kopplingsdäck, även kallat breadboard [25].
Den andra typen av kort som kan användas är PCB experimentkort, se Figur 6. PCB experimentkort är byggda för att kunna skapa mer permanenta system och kräver att alla sladdar och kretskort löds fast. Genom att löda fast komponenter skapas stabilare kopplingar som i princip eliminerar glapp som annars är ett relativt vanligt fenomen med kopplingsdäck. Ett inom branschen naturligt steg i utvecklingsprocessen är att överföra det färdiga systemet byggt på kopplingsdäcket till ett PCB experimentkort. PCB korten finns likt kopplingsdäcken tillgängliga i olika storlekar och former.
Figur 6. PCB experimentkort [25].
Voltregulator
En voltregulator jämnar ut inkommande spänning genom att förvandla överflödig energi till värmeenergi. Om man skulle zooma in på spänningen i en graf där den horisontella axeln motsvarar tid och den vertikala axeln volt, skulle man se att grafen är taggig och inte helt jämn. På grund av hur känsliga vissa komponenter är för spänningsförändringar kan till och med ytterst små avvikelser medföra stora skillnader i slutändan. En voltregulator jämnar ut kurvan och skapar förutsättningar för mer precis datakommunikation från sensorer [15].
En visuell representation av hur en voltregulator påverkar utseendet på spänningen visualiserat i en graf kan ses nedan, se Figur 7 och Figur 8. Dessa grafer är överdrivna för att på ett enkelt
Figur 7. Inmatning av spänning till voltregulatorn.
Figur 8. Utmatning av spänning från voltregulatorn.
Resistorer
För att förstå när och varför man bör använda en resistor behövs grundläggande förståelse för hur de fungerar. Det är också viktigt att förstå vilken storlek på resistorn man bör använda för olika situationer. En resistor ökar det elektriska motståndet i en krets vilket i sin tur sänker spänningen. Beroende på hur känslig en specifik komponent är för spänning kan det vara mer eller mindre viktigt att använda en resistor.
Vissa komponenter kan vara byggda för klara 3.3V eller 5V medan andra komponenter behöver en specifik spänning som ligger under, mellan eller över ovan nämnda intervall. Ett exempel på en komponent som är känslig för spänning är LED-dioder. För att komplicera det ytterligare behöver olika färger på LED-dioden olika storlekar på resistorn [16]. Anledningen till detta är att spänningsfallet för dioden skiljer sig beroende på vilken färg den lyser med, se Tabell 4.
Spänningsfall hos LED-dioder beroende på färg kan ses i tabellen nedan, se Tabell 4. Färg Spänningsfall (volt) Röd 1.6 – 2 Gul 2.1 – 2.2 Orange 2 – 2.1 Blå 2.5 – 3.7 Grön 1.9 – 4 Violett 2.8 – 4 Ultraviolett 3.1 – 4.4 Vit 3.2 – 3.6
Tabell 4. Tabell över spänningsfall beroende på LED-diodens färg.
För att beräkna vilken resistor som behövs i sensorsystemet kommer ekvationen nedan användas, se Ekvation 1. Med hjälp av ekvationen går det beräkna vilken resistor som krävs för att korrekt koppla en LED-diod. Storleken på resistorn påverkas av LED-diodens färg och därmed spänningsfallet hos LED-dioden. Ekvationen tar hänsyn till diodens spänningsfall, spänningskällan och hur mycket ström lampan drar. Ekvationen ger sedan svar på den optimala storleken för en resistor i kretsen.
(2.1)
𝑅 =
(𝑉
𝑆
− 𝑉
𝐿𝐸𝐷
)
𝐼
𝐿𝐸𝐷
Ekvation 1. Räknar ut vad för resistor som behövs för en LED-diod.
• R = Resistans • VS = Spänningskälla
• VLED = Spänningskälla från LED • ILED = Ström genom LED
Optimal storlek på resistor för kretsen ges genom att först räkna ut differensen mellan spänningskällan och spänningsfallet. Differensen divideras sedan med hur många ampere som dioden kräver enligt lampans specifikationer [17].
Lastceller & Wheatstone bryggor
Lastceller kan användas för att mäta krafter som uppstår vid väldigt små böjningar i exempelvis en stödjande balk, se Figur 9. Lastceller används också i många fall för att mäta en tyngd och används exempelvis i badrumsvågar. Lastcellen känner av förändringar i tryck och förvandlar detta tryck till en elektrisk signal. Den elektriska signalen förstärks linjärt i och med att trycket på lastcellen ökar. Denna signal är dock ofta väldigt svag. Detta kräver ofta att en lastcellsförstärkare behöver användas tillsammans i kretsen för att förstärka signalen.
Figur 9. Lastcell [23].
Konstruktionen av en lastcell innefattar en Wheatstone brygga. Detta är en elektrisk krets utvecklad av Charles Wheatstone. En Wheatstone brygga kan användas för att mäta nästan obefintligt små förändringar av resistans i en elektrisk krets.
En bild på hur en Wheatstone brygga ser ut kan ses nedan, se Figur 10. Teorin bakom bryggan bygger på ekvationen nedan, se Ekvation 2. I Figur 10 visas utgångsläget för bryggan, i detta läge sägs bryggan vara balanserad. I en lastcell är töjningsgivaren ansluten vid R1, se Figur 11. Töjningsgivaren ökar motståndet i kretsen när den utsätts för böjning. När lastcellen utsätts för tryck och resistansen i kretsen ökar kommer Wheatstone bryggan ge ut motsvarande elektrisk spänning [7]. Denna elektriska spänning ökar linjärt ju högre tryck lastcellen utsätts för. Eftersom signalen ökar linjärt med trycket kan en lastcell kalibreras via mjukvara. När lastcellen är kalibrerad kan den exempelvis användas i en badrumsvåg för att mäta vikt.
𝑅1 ∗ 𝑅3 = 𝑅2 ∗ 𝑅4
(2.2)
Accelerometer
En accelerometer används för att mäta acceleration i olika riktningar. En accelerometer mäter acceleration genom att mäta förändringar i kapacitans [4]. Nedan visas en bild på hur en accelerometer ser ut se på mikronivå, se Figur 12. Den orangea massan är rörlig och sitter fast med små fjädrar. Massan kan endast röra sig i en riktning vilket illustreras i bilden. De gröna objekten är fasta plattor. När accelerometern utsätts för acceleration rör sig den orangea massan vilket minskar avståndet mellan de orangea och gröna stavarna. Skillnaden i avstånd mellan dessa stavar mäts med hjälp förändringen i kapacitans. Den orangea massan fungerar som en oscillator och rör sig kring ett jämviktsläge. Värdet av accelerationen blir därmed ett värde mellan 0 och 1. Beroende på accelerometerns specifikationer kan accelerometern mäta olika hastigheter på acceleration.
Figur 12. Mikrostrukturen hos en accelerometer [8].
Gyroskop
Ett gyroskop är en slags sensor som har möjlighet att bestämma ett objekts orientering, se Figur 13. Gyroskopet mäter vinkelhastigheten med hjälp av corioliseffekten [1]. När ett objekt rör sig i en riktning vilket visualiseras av den röda pilen nedan och samtidigt roterar, uppstår corioliseffekten. Corioliseffekten visualiseras nedan med hjälp av den blåa pilen. Den svarta massan i bilden nedan roterar kontinuerligt.
Figur 13. Illustrativ bild på hur corioliseffekten utnyttjas av gyroskop [8].
Mikrostrukturen hos ett gyroskop påminner mycket om hur en accelerometer ser ut, se Figur 14. Gyroskopet fungerar på ett liknande sätt som accelerometern. När gyroskopet utsätts för rotation, antingen medsols eller motsols kommer den orangea massan flytta på sig. Detta sker eftersom kraften som skapas av corioliseffekten då förstärks eller försvagas. Skillnaden i avstånd mellan de rörliga och fasta stavarna kan sedan mätas med hjälp av förändring i kapacitans. Beroende på gyroskopets specifikationer kan sensorn känna av olika stora rörelser.
GPS
Ordet GPS står för Global Position System. Systemet fungerar genom trilateration, vilket inte bör förknippas med triangulering [3]. Triangulering mäter vinklar medan trilateration används för att mäta avstånd. Nedan visas ett tvådimensionellt exempel på hur tre GPS sateliter kan användas för att fastställa en enhets position, se Figur 15. Det första som händer är att sateliten innuti den blå radien sänder ut en signal till GPS mottagaren. Signalen som skickas innehåller avståndet från sateliten till jorden, vinkeln finns dock inte med.
Detta innebär att GPS mottagaren skulle kunna befinna sig var som helst inuti den blå radien. GPS mottagaren mottar sedan en andra signal som kommer från satelliten inuti den gröna radien. GPS mottagaren har med andra ord lyckats fånga signaler från både den blå samt den gröna satelliten. Detta innebär att enheten befinner sig i genomskärningen mellan den blå och gröna radien. På samma sätt används den tredje signalen via den orangea satelliten för att med hög precision fastställa enhetens position.
2.5 Lagringsformat
Det vanligaste formatet av teckenkodning har historiskt varit ASCII [2]. På senare tid har dock UTF-8 vuxit ifrån ASCII och blivit det mest förekommande formatet av teckenkodning, enligt en studie gjord av Google, se Figur 16.
Figur 16. Grafen visar de mest använda teckenkoderna på internet [18].
Nedan visas de egenskaper som teckenkodsformatet ASCII innehar, se Tabell 5.
ASCII
Stödjer alla siffror (0-9) Stödjer alla bokstäver i engelska alfabetet Stödjer ÅÄÖ Stöder ytterligare tecken såsom arabiska bokstäver Ja Ja Nej Nej
Tabell 5. ASCII teckenkodsformat.
Nedan visas de egenskaper som teckenkodsformatet W Europe, även kallat ISO/IEC 8859-1 innehar, se Tabell 6.
W Europe (ISO/IEC 8859-1)
Stödjer alla siffror (0-9) Stödjer alla bokstäver i engelska alfabetet Stödjer ÅÄÖ Stöder ytterligare tecken såsom arabiska bokstäver Ja Ja Ja Nej
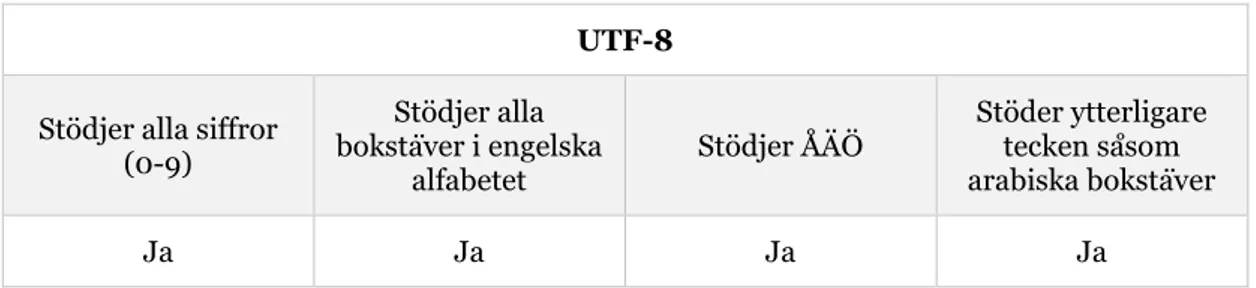
Nedan visas de egenskaper som teckenkodsformatet UTF-8 innehar, se Tabell 7.
UTF-8
Stödjer alla siffror (0-9) Stödjer alla bokstäver i engelska alfabetet Stödjer ÅÄÖ Stöder ytterligare tecken såsom arabiska bokstäver Ja Ja Ja Ja
Tabell 7. UTF-8 teckenkodsformat.
Alla tre format stödjer alla siffror (0-9) och även alla bokstäver i det engelska alfabetet. Skillnaden mellan formaten är att både UTF-8 och W Europe stödjer vissa tecken som ASCII inte har stöd för, exempelvis ÅÄÖ. UTF-8 har utöver detta även stöd för arabiska bokstäver och en enorm mängd andra tecken.
I tabellen nedan visas de tecken som ASCII teckenkodsformatet har stöd för, se Tabell 8.
Nedan visas de tecken som W Europe, även kallat ISO/IEC 8859-1 har stöd för, se Tabell 9.
Tabell 9. ISO/IEC 8859-1 [20].
En tabell över de karaktärer som UTF-8 stödjer har inte inkluderats på grund av storleken som en sådan tabell skulle uppta i rapporten.
En betydande skillnad mellan UTF-8 och de två övriga formaten är skillnaden i hur mycket plats en karaktär upptar på lagringen. I både ASCII och W Europe upptar varje karaktär en position på lagringen. UTF-8 fungerar däremot annorlunda, exempelvis kan ett arabiskt tecken istället uppta två eller tre positioner på lagringen. Detta kan ses både som en fördel eller nackdel för UTF-8. Fördelen är det skapar möjlighet för hantering av fler tecken och symboler. Nackdelen är dock att det kan vara svårt att avgöra hur stor en fil kommer bli eftersom olika karaktärer upptar olika mycket plats på lagringen. För att utvärdera de tre lagringsformaten på ett objektivt sätt togs beslutet att använda viktning via Pughs matris, se Tabell 11.
2.6 Lagringsmedia
De tre mest förekommande lagringsmedierna är, mekaniska hårddiskar (HDD), Solid State diskar (SSD) och Secure Digital kort (SD). Fördelar med mekaniska hårddiskar är ett lägre pris jämfört med SSD och SD kort. Nackdelar med en mekanisk hårddisk inkluderar hög vikt, hög energikonsumtion och stor fysisk volym, se Figur 17. En annan stor nackdel med en mekanisk hårddisk är att den innehåller rörliga delar. Rörliga delar innebär större risk för fel och gör lagringen extra känslig för vibrationer och fall. Mekaniska hårddiskar lämpar sig bäst för stationära datorer och servrar.
Figur 17. Mekanisk hårddisk (HDD) [22].
Solid state diskar är mindre till volymen än mekaniska hårddiskar, de innehåller heller inga rörliga delar, se Figur 18. Detta gör att dessa typer av diskar passar utmärkt till exempelvis laptops. Nackdelar med solid state diskar är ett högre pris jämfört med mekaniska hårddiskar.
Figur 18. Solid State-disk (SSD) [21].
Secure digital kort är sett till volymen mindre än både mekaniska hårddiskar och solid state diskar, se Figur 19. Fördelen med denna lagring är att den på grund av storleken och den låga vikten med enkelhet kan placeras inuti exempelvis mobiltelefoner och surfplattor. På grund av storleken används denna typ av lagring även för exempelvis drönare där varken en HDD eller SSD skulle passa in. Denna lagringstyp är likt SSD helt solid och innehåller inga rörliga delar. Nackdelar med secure digital kort är ett högre pris jämfört med mekaniska hårddiskar.
3
Metod
Den praktiska delen av projektet kommer huvudsakligen innefatta konstruktion av ett sensorsystem byggt för att kunna mäta effekter på solbilen från varierande körning. Detta inkluderar studier om sensorer och optimalt sätt att få ut relevant information vid
användning. Studier om vad för data som är relevant vid tester och körningar inom bilindustrin kommer också göras. Det innebär även en studie om kretskort och hur de fungerar samt hur kretskort och sensorer kan kopplas ihop för att kunna utvinna relevant data.
Den teoretiska delen består främst av forskning samt baklängeskonstruktion, detta för att förstå hur mätningar görs inom bilindustrin, eftersom det redan görs på ett effektivt sätt idag. Även för att förstå vad för data som samlas in samt förstå hur den kan användas till att optimera bilens konstruktion och vikt till framtidens solbilsprojekt.
3.1 Viktning av enkortsdatorer i Pughs matris
Nedan viktas de utifrån kravspecifikationen viktigaste egenskaperna som de olika enkortsdatorerna har, se Tabell 10.
Pughs matris
Egenskap Raspberry Pi 4 Arduino Uno STM32 Black Pill
Energiförbrukning +1
Prestanda +1 +1 +1
Användarvänlighet +1 +1
Fysisk storlek och
vikt +1
Kräver ej
operativsystem +1 +1
Totalpoäng 2 3 4
Tabell 10. Viktning av enkortsdatorer i Pughs matris.
Resultatet från Pughs matris visar att STM32 Black Pill får fler poäng än både Arduino Uno och Raspberry Pi 4. Den enda punkten som STM32 Black Pill förlorar på är ”användarvänlighet”.
3.2 Viktning av teckenkodsformat i Pughs matris
För att välja mellan teckenkodsformaten viktades dess egenskaper enligt Pughs matris i tabellen nedan, se Tabell 11.
Pughs matris
Egenskap ASCII W Europe UTF-8
Stödjer alla siffror
(0-9) +1 +1 +1 Stödjer alla bokstäver i engelska alfabetet +1 +1 +1 Stödjer ÅÄÖ +1 +1 Stöder ytterligare tecken såsom arabiska bokstäver +1 Varje karaktär upptar en position på lagringen +1 Totalpoäng 3 3 4
Tabell 11. Viktning av teckenkodsformat i Pughs matris.
Resultaten från Pughs matris visar att UTF-8 får fler poäng än både W Europe och ASCII. Resultatet var dock väldigt jämnt. Den enda punkten som UTF-8 förlorar på är ”Varje karaktär upptar en position på lagringen.”
3.3 Uppskattning för behov av lagringskapacitet
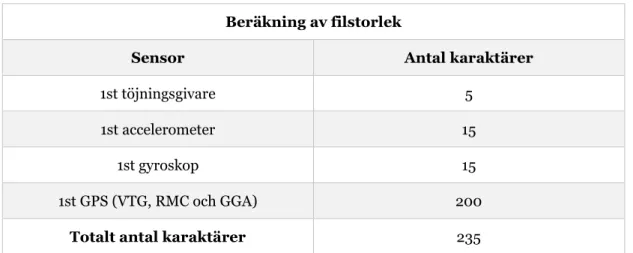
Nedan visas de karaktärer som varje sensor i sensorsystemet förväntas skriva under en sekund, se Tabell 12. Antalet karaktärer kommer inte förändras beroende på om ASCII, W Europe eller UTF-8 används som teckenkodsformat. Varje karaktär upptar en position på lagringen vilket innebär att det förväntade lagringsbehovet i systemet kan räknas ut.
Beräkning av filstorlek
Sensor Antal karaktärer
1st töjningsgivare 5
1st accelerometer 15
1st gyroskop 15
1st GPS (VTG, RMC och GGA) 200
Totalt antal karaktärer 235
Tabell 12. Antal karaktärer som varje sensor förväntas skriva.
Behov av lagringskapacitet ges av ekvationen nedan, se Ekvation 2. Bokstaven C i ekvationen motsvarar antalet sekunder under 24 timmar. Antalet karaktärer per tick ges av tabellen ovan, se Tabell 12.
(3.1)
𝑋 = 𝑡𝑜𝑡𝑎𝑙𝑡 𝑎𝑛𝑡𝑎𝑙 𝑘𝑎𝑟𝑎𝑘𝑡ä𝑟𝑒𝑟 𝑝𝑒𝑟 𝑡𝑖𝑐𝑘 ∗
𝑢𝑝𝑝𝑑𝑎𝑡𝑒𝑟𝑖𝑛𝑔𝑠𝑓𝑟𝑒𝑘𝑣𝑒𝑛𝑠
𝑠𝑒𝑘𝑢𝑛𝑑
∗ 𝐶
Ekvation 2. Ekvation för att beräkna behov av lagringskapacitet i systemet.
Nedan visas de karaktärer som varje sensor i ett avancerat sensorsystem förväntas skriva under en sekund, se Tabell 13.
Beräkning av filstorlek i ett avancerat system
Sensor Antal karaktärer
8st töjningsgivare 40
8st accelerometrar 120
8st gyroskop 120
2st GPS (VTG, RMC och GGA) 400
3.4 Beslutsprocess vid val av systemets resterande komponenter
Systemets resterande komponenter valdes enligt tabellen nedan där samtliga krav var tvungna att uppfyllas vid inköp, se Tabell 14. Ett fåtal undantag gjordes i form av rekommendationer från JU Solar Teams ledning på Jönköping University. Vid tillfällen där flera alternativ uppnådde kraven prioriterades användarvänlighet och funktion. Användarvänlighet baserades på tillgänglig information om produkten online. Denna information var exempelvis guider, YouTube videor och tillgänglig kod på GitHub.com med mera. Funktion innebar hur väl komponenten uppfyllde ett specifikt krav i kravspecifikationen.Beslutande faktorer vid val av resterande komponenter
Bidrar till att möta kraven ställda i kravspecifikationen Är kompatibel med vald enkortsdator
Har stöd för 3.3V spänningsmatning Finns i lager hos en svensk återförsäljare
Är rimligt prissatt utifrån examensarbetets budget
4
Genomförande och resultat
4.1 Hur utför bilindustrin tester för att fånga upp effekter av körning?
Finns det något standardiserat arbetssätt?
Det finns flera olika typer av tester som en mängd olika biltillverkare arbetar efter. En arbetsmetod som varit värdefull att ta inspiration ifrån till detta arbete har varit test av bilar på kullersten, hinder, ojämn väg och liknande underlag. Dessa underlag kan vara både naturligt eller artificiellt skapade. Genom att studera hur biltillverkare utför dessa tester och vad för data de är intresserade av har utvecklandet av sensorsystemet underlättats enormt mycket. Genom att veta vad för data framgångsrika bilföretag letar efter, skapas en automatisk insmalning kring vad för komponenter som kan vara värdefulla för detta arbete. Kraven från kravspecifikationen skapar tillsammans med detta en ganska liten lista på exakt vad för komponenter som kan vara passande att använda.
Vilken hårdvara används?
Hårdvaran som används inom bilindustrin är olika former av sensorer eller mätsystem med tillhörande datorsystem. Mycket på grund av sekretesskäl och en liten mängd tillgänglig offentlig information om området är det svårt att avgöra exakt vilka komponenter som används. Det är troligt att många eller kanske alla företag använder delvis eller helt egenutvecklade sensorer och mätsystem. Den data man är intresserad av är dock densamma oavsett biltillverkare. När det kommer till lastfall som påverkar hjulupphängningen är det just hårdvara som kan mäta accelerationer eller krafter vid körning över ett exempelvis gupp eller hål i vägen man är intresserad av.
4.2 Vilken hårdvara krävs för att möta kraven som har ställts i
kravspecifikationen?
Komponentval
Alla komponenter är valda enligt Pughs matris som har visats i Tabell 10, Tabell 14 och ekvationen i Ekvation 1.
Enkortsdator
Huvuddatorn till systemet valdes till ett STM32F401CCU6 Black Pill kort, se Figur 20.
Accelerometer
SparkFun LSM9DS1, se Figur 21. Denna sensor kan mäta acceleration i tre dimensioner. Utöver detta har den en inbyggd magnetometer och gyroskop [35]. Sensorn är av storleken 30mm x 30mm och har en väldigt låg vikt.
Figur 21. SparkFun LSM9DS1. Accelerometer, magnetometer och gyroskop.
Luftkvalitetssensor
BME680, se Figur 22. Sensorn har möjlighet att mäta temperatur, lufttryck och luftfuktighet. Sensorn är strömsnål och kan drivas av endast två volts spänningsmatning [47].
Figur 22. BME 680.
GPS kort
Adafruit Ultimate GPS Breakout, se Figur 23. Kortet har möjlighet att uppdatera platsposition tio gånger per sekund och har även en inbyggd funktion för att logga data. Utöver detta finns stöd för anslutning av en extern GPS sensor [37].
Lastcell
Lastcell med kapacitet att mäta laster upp till 10 kg, se Figur 24. Den vita plastfilmen känner av när cellen böjs eller utsätts för tryck och skickar sedan iväg datan genom sladdarna. Lastcellen kan mäta väldigt små förändringar i tryck med stor noggrannhet.
Figur 24. Lastcell.
Lastcellsförstärkare
HX711 lastcellsförstärkare, se Figur 25. Kortet läser och översätter datan från lastcellerna för att sedan skicka vidare informationen till STM32 kortet. Kortet ger ut data utan enheter och behöver kalibreras för att visa korrekt data i form av newton eller kilogram.
Figur 25. HX711 lastcellsförstärkare.
Kombinatorkort
Kombinatorkort för lastceller, se Figur 26. Detta kretskort skapar möjlighet att koppla ihop fyra stycken lastceller. Lastcellernas avläsningar kan slås ihop för att sedan skicka vidare datan. Kortet är kompatibelt med HX711 lastcellsförstärkaren.
Batteri
3.7 volts LiPo batteri, 8000mAh, se Figur 27. Batteriet har inbyggt skydd för överbelastning, kortslutning samt underspänning. Vikten ligger på 140g med dimensionerna 90mm x 60mm x 12mm.
Figur 27. 3.7V LiPo batteri, 8000mAh.
Batteriövervakare
SparkFun Battery Babysitter, se Figur 28. Batteriövervakaren kan både ladda samt övervaka batteriet under användning. Kortet är självkalibrerande och mäter kontinuerligt batteriets spänning och strömnivå. Kretsen har även möjlighet att mäta systemets strömförbrukning.
Figur 28. SparkFun Battery Babysitter.
Lagring
SanDisk Ultra 128GB Micro-SD kort, se Figur 29.
Micro SD adapter
Micro SD läsare, se Figur 30 och SD läsare, se Figur 31. STM32 kortet har ingen port för att direkt koppla in ett Micro SD eller SD kort, det behövs en adapter. På grund av sena leveranstider av Micro SD läsaren beställdes en SD läsare vid samma tillfälle.
Figur 30. Micro SD läsare.
Figur 31. SD-läsare.
LED-diod
TLLR4401 röda lågströms LED-dioder, se Figur 32. Dessa dioder kräver 2 mA för att drivas.
Figur 32. LED-dioder.
Kopplingsdäck
Kopplingsdäck, se Figur 33. Kopplingsdäcket har 840 anslutningar. De två översta samt nedersta raderna är kopplade så att strömmen rör sig längsgående (horisontellt) medan strömmen i resterande hål rör sig vertikalt. De längsgående kopplingarna skapar möjlighet för spänningsmatning, se Figur 62 i bilagan Installationsguide för sensorsystem för ett exempel på hur detta kan utnyttjas för att effektivisera kopplingsschemat. Det finns även möjlighet att koppla ihop flera kopplingsdäck i varandra för att skapa en större arbetsyta.
Experimentkort
PCB experimentkort, se Figur 34. Experimentkortet har 840 anslutningar och samma layout som ovan kopplingsdäck.
Figur 34. PCB experimentkort med 840 anslutningar.
Voltregulator
MCP 1700 voltregulator, se Figur 35. Regulatorns utspänning ligger på 3.3V och den maximala utgångsströmmen är 250mA.
Figur 35. MCP1700 voltregulator.
Labbsladd
Labbsladdar i form av hona-hane, hane-hane och hona-hona, se Figur 36. Utöver dessa köptes det även in ett par varianter med krokodilklämmor och längre stift.
Klocka
DS1302 klockmodul, se Figur 37. Modulen innehåller ett inbyggt knappbatteri vilket gör modulen självgående. Modulen håller med hjälp av knappbatteriet koll på tid samt datum även om sensorsystemet skulle förlora ström. Klockan tar hänsyn till skottår och liknande händelser.
Figur 37. DS1302 klockmodul.
Resistor
Resistor med ett motstånd på 750 ohm, se Figur 38. Resistorn valdes med hänsyn till färgen röd på LED-dioden.
4.21 Resultat från beräkning för behov av lagringskapacitet
För att beräkna behov av lagringskapacitet kommer en tidigare nämnd ekvation användas, se Ekvation 2. I denna ekvation förväntas systemet skriva data från sensorerna en gång per sekund. Resultat från beräkning för behov av lagringskapacitet ges av ekvationen nedan, se Ekvation 3. Systemet behöver minst 200 MB lagringskapacitet för att möta minimikraven ställda i kravspecifikationen.
(4.1)
𝑋 = 235 ∗
1
1
∗ 86 400 ≅ 200 𝑀𝐵
Ekvation 3. Resultat från beräkning av datamängd.
4.22 Resultat från beräkning för behov av lagringskapacitet i ett
avancerat system
För att beräkna behov av lagringskapacitet i ett avancerat system kommer en tidigare nämnd ekvation användas, se Ekvation 2. I denna ekvation förväntas systemet skriva data från sensorerna 100 gånger per sekund. Resultat från beräkning för behov av lagringskapacitet ges av ekvationen nedan, se Ekvation 4. Systemet skulle behöva minst 6 GB lagringskapacitet för att möta kravet i ett avancerat system.
(4.2)
𝑋 = 680 ∗
100
1
∗ 86 400 ≅ 6 𝐺𝐵
Ekvation 4. Resultat från beräkning av datamängd.
4.23 Resultat från individuellt kopplade sensorer
Första steget i att få ett komplett sensorsystem var att koppla samt utveckla en kod till varje sensor var för sig, detta för att få alla sensorer till att fungera individuellt och kunna utvinna den önskvärda datan. Nästa steg i processen var att koppla ihop flera sensorer parallellt och skriva en sammansatt kod för dessa. Sista steget bestod av att implementera nödvändig kod för att kunna överföra insamlad data till lagringsmediet.
Individuella kopplingar samt kodning av alla sensorer och lagringskort gav önskat resultat. Alla komponenter fungerade för sig själva. Kopplingsscheman och kod för varje komponent kan hittas i bilagan Installationsguide för sensorsystem.
En bild på hur experimenterandet av de olika sensorerna kan ses nedan, se Figur 39. STM32 kortet var här anslutet till ett kopplingsdäck via många små stift som är fastlödda på STM32 kortet. Det finns två stycken grundläggande kopplingar som alltid finns behövs vid anslutning av ett kretskort, en strömförsörjande koppling samt en jordad koppling. STM32 kortet har möjlighet att mata ut ström med 3.3V eller 5V. Vissa kretskort klarar av både 3.3V och 5V medan andra sensorer behöver minst 5V för att fungera optimalt. En viktig del i utvecklingsarbetet var att kontrollera att samtliga sensorer och komponenter fungerade med STM32 kortet samt den utvecklingsmiljö som koden skrevs i, se Figur 40.
Figur 39. STM32 kortet ihopkopplat med BME680 luftkvalitetssensor.
Utöver dessa två kopplingar används oftast någon form av datakoppling för att möjliggöra datakommunikation mellan STM32 kortet och sensorn. I bilden nedan har två sladdar anslutits för detta ändamål, en SDA och en SCL koppling. Varje stift på STM32 kortet motsvarar en specifik koppling som stödjer en specifik typ av kommunikation. Stiften är numrerade med siffror och bokstäver. Stiftens funktion kan avläsas i ett stiftschema för att ta reda på var exempelvis en SDA sladd kan kopplas, se Figur 41.
Figur 41. Stiftschema över ett STM32 Black Pill [45].
Varningssystem via LED-dioder
Följande experiment utfördes för att verifiera att varningssystemet fungerade i praktiken genom att kontrollera om lampan började blinka när en sensor kopplades bort. Lampan skulle även slockna när kortet återanslöts för att experimentet skulle ses som godkänt. Detta
experiment skapar förtroende för att koden bör fungera även för resterande sensorer. Ett utdrag som visar delar av koden för varningslampan kan ses nedan, se Figur 42. Koden har skrivits i programmeringsspråket Python.
1. int led = PB13;
2. while (!lsm.begin())
3. {
4. //Serial.println("Oops ... unable to initialize the LSM9DS1. Ch eck your wiring!");
5. digitalWrite(led, HIGH);
6. delay(300);
7. digitalWrite(led, LOW);
8. delay(300);
9. }
Kalibrering av lastceller & klockmodul
Ett annat experiment som utfördes under arbetet var kalibrering av lastceller, se Figur 43. Från fabrik och utan en specialanpassad kod ger dessa lastceller endast ifrån sig data i form av enhetslösa siffror. Dessa siffror har inte någon koppling till varken kilogram eller newton. För att kalibrera sensorerna byggdes därför flera stycken kalibreringsinstrument. Koden som användes vid kalibrering nollställde värdet som lastcellen läste vid uppstart, samma princip som när en badrumsvåg nollställs. Vikter av olika slag placerades sedan ovanpå lastcellen. Genom att multiplicera siffran som lastcellen skrev ut med ett specifikt tal kan man få lastcellen att med väldigt stor noggrannhet korrekt mäta det placerade föremålets vikt.
För att verifiera att koden fungerade rätt placerades därefter ett antal olika vikter ovanpå lastcellen. Datan jämfördes sedan med föremålets verkliga vikt. I dessa experiment har lastceller anpassade 1 kg, 5 kg och 10 kg vikter använts. Lastceller med olika mätkapaciteter kräver en specifik multiplikationsfaktor i koden för att fungera korrekt.
Lastcellerna kalibrerades via koden nedan, se Figur 44. Kalibreringsfaktorn justerades på rad tre för att matcha värdet av vikterna som placerades på kalibreringsinstrumentet.
1. #include "HX711.h"
2.
3. #define calibration_factor 1337.0 //Kalibreringsfaktor
4. #define DOUT PA3
5. #define CLK PA2
6. HX711 scale;
7.
8. void setup() {
9. Serial.begin(9600);
10. Serial.println("HX711 scale demo");
11.
12. scale.begin(DOUT, CLK);
13. scale.set_scale(calibration_factor);
14. scale.tare(); //Assuming there is no weight on the scale at start u p, reset the scale to 0
15.
16. Serial.println("Readings:");
17. }
18. void loop() {
19. Serial.print("Reading: ");
20. Serial.print(scale.get_units(), 1);
21. Serial.print(" kg");
22. Serial.println();
23. }
Figur 44. Kod för kalibrering av lastceller.
Ett annat kretskort som behövde kalibreras var klockmodulen. Tiden behövde justeras för att stämma överens med den lokala tiden i Sverige. Ett utdrag av koden för klockmodulen kan ses nedan, se Figur 45. Klockan tid justerades på rad 3.
1. // Set the current date, and time in the following format:
2. // seconds, minutes, hours, day of the week, day of the month, month, year
3. //myRTC.setDS1302Time(15, 28, 10, 1, 11, 5, 2020); //Here you write your actual time/date as shown above
4. //but remember to "comment/remove" this function once youre done 5. //The setup is done only one time and the module will continue
counting it automatically
4.24 Resultat från sammankopplade sensorer
Sammankoppling av accelerometer & luftkvalitetssensor
Den första sammansatta kopplingen som gjordes av sensorer och kod var koppling av accelerometern tillsammans med lufttryckssensorn. Denna koppling gav önskat resultat med en fungerande kod samt läsning av accelerometerns tre sensorer, accelerometer, gyroskop och magnetometer. Luftkvalitetssensorns tre inbyggda sensorer för lufttryck, luftfuktighet och temperatur gav också önskat resultat. I denna koppling inkluderades även en varningslampa som blinkade när systemet märkte att en sensor hade kopplats ifrån. Lampan slutade blinka när sensorn återanslöts enligt förväntningar.
Sammankoppling av accelerometer & SD kort läsare
För att verifiera systemets förmåga att skriva och spara data till ett lagringsmedia anslöts både accelerometern och Micro SD läsaren till STM32 kortet, se Figur 46. Vid initiala tester fick dock inte systemet kontakt med Micro SD läsaren. Felet visade sig senare bero på att Micro SD kortet inte var formaterat till rätt filformat. En inbyggd begränsning i Windows 10 innebar att det inte var möjligt att formatera ett Micro SD kort med över 32 GB i storlek till FAT32, vilket var det format som krävdes. För att komma förbi denna begränsning användes ett tredjepartsprogram för att lösa problemet [24].
Detta test verifierade tidigare teorier om uppskattad filstorlek efter erhållen data från sensorer. I detta test sparades datan från accelerometern till ett textdokument. Textdokumentet öppnades sedan i en dator för verifikation av att datan hade sparats korrekt.
Sammankoppling av accelerometer, luftkvalitetssensor & Micro SD läsare
En annan sammankoppling med flera sensorer kan ses nedan, se Figur 47. Syftet med denna sammankoppling var att verifiera att STM32 kortet i praktiken kunde hantera flera enheter samtidigt. Det var även viktigt att undersöka om STM32 kortets strömförsörjning som den matade ut var tillräcklig. Tester likt dessa verifierade även om koden fungerade eller inte. Ibland var det svårt att avgöra om systemet var fysiskt felkopplat/inte fungerade eller om koden var felskriven. Med hjälp uteslutningsmetoden och genom att steg för steg inkludera fler och fler kretskort till systemet blev det lättare att avgöra var felet kunde befinna sig när det uppstod.
Sammankoppling av accelerometer, batteri & LED-diod
Test av batteriförsörjning och varning för sensorfel kan ses nedan, se Figur 48. Detta test verifierade dels batteriets förmåga att driva delar av sensorsystemet på 100% batteridrift, men också förmågan att varna användaren då den tappar kontakt med exempelvis en accelerometer. Simulering av tappad kontakt med kretskortet utfördes genom att både fysiskt plocka bort sensorn från kopplingsdäcket men också genom att endast koppla bort datakabeln eller strömkabeln.
Figur 48. Test av batteriförsörjning och varning för sensorfel.
Sammankoppling av lastceller & kombinatorkort
Denna sammankopplingen gav inte det förväntade resultatet då lastcellerna som användes inte var kompatibla med kombinatorkortet. Lastcellerna var kopplade genom en wheatstone brygga, denna koppling använder sig av fyra sladdar medan kombinatorkortet är designat för lastceller som endast använder tre sladdar. Slutsatsen av denna sammankoppling var att kombinatorkortet inte kunde inkluderas i sensorssystemet.
Sammankoppling av accelerometer, luftkvalitetssensor, 2st lastceller, LED-diod, SD kort
läsare & batteri
I denna sammankoppling kopplades alla komponenter som var tänkta att systemet skulle bestå av ihop, se Figur 49. Denna sammankoppling gav önskat resultat. Batteriet drev under denna koppling huvuddatorn och samtliga sensorer. Varningssystemet via LED-dioder fungerade som önskat. Data från samtliga sensorer sparades framgångsrikt till SD kortet. Den enda sensorn som inte inkluderades i denna koppling var GPS kortet. Anledningen till att GPS kortet inte inkluderades berodde på kompatibilitetsproblem när sensorn kopplades tillsammans med andra sensorer.
4.25 Slutgiltigt resultat
Nedan visas det slutgiltiga systemet exklusive GPS kortet monterat på två stycken kopplingsdäck, se Figur 49. Systemet innehåller en accelerometer, en luftkvalitetssensor, två lastceller, en Micro SD läsare samt fyra stycken LED varningslampor.
Nedan visas samma system som tidigare nämn men istället monterat på två PCB experimentkort, se Figur 50. PCB experimentkorten har samma storlek och layout som de kopplingsdäck använda tidigare i arbetet. Systemet fungerade funktionellt identiskt som när det var monterat på kopplingsdäcken tidigare.
Figur 50. Det slutgiltiga systemet fastlött på två PCB experimentkort.
4.26 Batteri- och drifttest
Systemets batteri testades och en drifttid på approximativt 72 timmar uppmättes. Under detta test var samtliga sensorer aktiva vilket bör spegla verkliga förhållanden. Resultatet betyder att systemet med stor marginal översteg kravet i kravspecifikationen vilket var 24 timmar drifttid. Systemet kan därmed ses ha en säkerhetsfaktor på tre, sett till batteritid. Detta innebär att systemets batteri är överdimensionerat gentemot kravspecifikationen.
4.27 Kan ett system som samlar in relevant data konstrueras?
Ett system som samlar in relevant data har konstruerats vilket besvarar denna frågeställning. Systemet har mött kraven i kravspecifikationen exklusive kravet på att en GPS sensor ska vara inkluderat i systemet. Systemet har lötts ihop på två PCB experimentkort. Detta skapar möjlighet att vid behov byta ut sensorer eller kretskort.
4.28 Vilket format av datan ger bäst lagringsmöjlighet med hänsyn till
prestanda och lagringskapacitet?
Datan som sensorerna samlar in och sedan sparas till Micro SD kortet kan formateras på diverse sätt. Med hänsyn till lagringskapacitet skulle formatet av data kunna förändras jämfört med hur det ser ut nu, detta skulle innebära bättre lagringskapacitet och eventuellt bättre prestanda för sensorsystemet. Anledningen till att formatet på datan inte har förenklats ytterligare mot hur den redan ser ut beror på ett antal faktorer. En anledning var att systemets lagring på 128 GB med stor marginal kommer räcka längre än batteriet. En annan anledning är att ytterligare förenkling av formatet på datan skulle minska användarvänligheten av systemet. Som datan sparas just nu skrivs exempelvis datan från accelerometern med ”m/s2” på slutet av raden.
5
Analys
5.1 Hur utför bilindustrin tester för att fånga upp effekter av körning?
Finns det något standardiserat arbetssätt?
Resultatet av sensorsystemet påminner mycket om olika system som används inom bilindustrin för att fånga upp effekter av körning. Trots att den specifika hårdvaran som används inom bilindustrin inte är känd skapar resultatet av detta arbete vissa slutsatser. I arbetets tidiga faser blev det känt att bilindustrin använder exempelvis accelerometrar, dock inte exakt vilken hårdvara. I och med att forskning har gjorts i arbetet har även kunskapen om sensorer ökat. Istället för att fråga sig exakt vilken komponent exempelvis Volvo använder sig av bör man istället fråga vad för data man är intresserad av samt vad för hårdvara man vill koppla sensorn till. Detta är en mycket bättre frågeställning.
Vilken hårdvara används?
Genom att veta vad för data man är intresserad av och vad för typ av system man vill använda kan man därifrån dra en slutsats kring vad för hårdvara som bör användas. Hårdvaran är med andra ord individuellt anpassad för situationen, plats och kostnad med mera. I detta arbete föll valet av huvudsystem på ett STM32 kort, därav är det inte rimligt att de sensorer som var mest lämpade i detta arbete är samma sensorer som Volvo anser vara optimala. En anledning till detta skulle exempelvis kunna vara att Volvo kopplar sitt sensorsystem till bilbatteriet medan systemet i detta arbete drivs av ett eget batteri. Denna fundamentala skillnad skapar olika förutsättningar och möjligheter för hur systemet kan vara uppbyggt.
Det standardiserade arbetssättet inom bilindustrin innebär inte att alla biltillverkare som mäter effekter från körning av bilar kommer komma fram till samma slutsats gällande hårdvara. Trots att funktionaliteten mellan olika system kan vara densamma kan det också vara annorlunda hårdvara som i slutändan används för att mäta samma sak.
5.2 Vilken hårdvara krävs för att möta kraven som har ställts i
kravspecifikationen?
Enkortsdator
Huvuddatorn till sensorsystemet behövde vara liten, strömsnål och kompatibel med sensorer samt och övriga kretskort. STM32 kortet blev efter resultatet i Pughs matris valet för vidareutveckling. En stor anledning till detta var den stora skillnaden i energiförbrukning mellan de tre enkortsdatorerna. En Raspberry Pi 4 eller Arduino Uno skulle leda till krav på större batterier för att möta kraven ställda i kravspecifikationen.
Skillnaden i fysisk storlek och vikt mellan Raspberry Pi 4, Arduino Uno och STM32 kortet var också en bidragande orsak till att den fick flest poäng i viktningen. Enligt kravspecifikationen var det ett krav att systemet inte skulle vara ett hinder för föraren med hänsyn till storlek och placering. Samtidigt som STM32 kortet var mindre och lättare hade den dock alla funktioner som krävdes för att möta kraven i kravspecifikationen. Inom vissa punkter var den till och med bättre. Exempelvis hade den dubbelt så många anslutningsstift jämfört med Arduino Uno vilket innebar att fler komponenter kunde kopplas ihop parallellt.
I och med att solbilen ska tävla i Australien ställer det krav på systemet gällande förmågan att utstå hög temperatur under långa perioder, vilket återigen gör STM32 kortet mer attraktivt som val. En sista fördel med STM32 Black Pill var att den inte krävde något operativsystem för att drivas. Windows 10 är ett exempel på operativsystem som används i många persondatorer. Fördelen med detta är att den går fortare att starta från kallstart.
professionella användare vilket gör kortet generellt svårare att arbeta med. Andra fördelar med Raspberry Pi 4 och Arduino Uno är bättre prestanda jämfört med STM32 kortet. Dessa egenskaper är dock något som inte är nödvändigt för detta arbete. En stark grafikdel är inget krav eftersom systemet inte kommer vara kopplat till någon skärm eller utföra grafiska beräkningar. Processorn var också starkare än nödvändigt eftersom systemets huvudsyfte endast var att läsa data från sensorer vilket inte är en för systemet speciellt krävande uppgift.
Accelerometer
Denna komponent uppfyllde alla kraven som var ställda i arbetet, kortet kördes på låg volt, var kompatibelt med STM32 kortet och hade möjlighet att mäta acceleration. Sensorn var gjord av företaget SparkFun vilket är ett företag som både skapar samt säljer elektroniska komponenter och kretskort. Företaget tillhandahåller även användarvänliga instruktioner samt kod för sina produkter, detta har utnyttjats under arbetet. Detta är extra betydelsefullt då mycket av kodning bygger på att modifiera kod redan existerande kod i en eller annan form.
En magnetometer var inget som var angivet som ett krav i kravspecifikationen, men i och med att kortet har den funktionen inbyggd så togs beslutet att inkludera funktionen som en del i systemet. I och med att magnetometern finns med skapas också möjligheten för framtida studenter att undersöka praktiska tillämpningar där den skulle kunna vara till nytta.
GPS kort
GPS kortet som köptes in visade sig vara en svårarbetad komponent med väldigt lite tillgänglig information kring hur den kopplas till STM32 kortet. GPS Kortet fungerade enskilt men när den väl sammankopplades med andra sensorer kraschade eller frös koret. Resultatet var att den endast kunde skriva ut nollor när den var sammankopplad med resten av systemet. Orsak till detta var okänd.
GPS kortet var dock trots problemen förmodligen det mest använda inom branschen och det fanns väldigt mycket dokumentation och guider kring det online, en stor fördel när man ska skriva kod. Majoriteten av informationen var tyvärr anpassad för Arduino Uno eller Raspberry Pi 4 och inte STM32 kortet.
Lastceller, lastcellsförstärkare och kombinatorkort
Lastcellerna fungerade med HX711 lastcellsförstärkaren, dock något ostabilt. Siffrorna som HX711 kortet skrev ut skiftade med tiden trots att ingen fysisk skillnad i vikt eller tryck skedde. Det var oklart exakt vad som orsakade detta problem. Det kan bero på att priset för HX711 kortet var väldigt lågt och därav kan en slutsats dras att kortet inte var byggt av tillräcklig kvalité. Lastcellerna var tänkta att användas tillsammans med ett kombinatorkort, detta för att möjliggöra läsning från flera sensorer parallellt utan att behöva använda flera HX711 kort. Tyvärr upptäcktes det under användning att lastcellerna som köpts in till projektet inte var kompatibla med det inköpta kombinatorkort. Lösningen som gjordes var att använda flera HX711 lastcellsförstärkarkort.
Batteri och batteriövervakare
Batteriet har valts utifrån kapacitet i form av milliamperetimmar och fysik formfaktor. Det fanns större batterier på marknaden men dessa vägde mer och skulle även ta längre tid att ladda från urladdat till fulladdat. Ett större batteri hade också inneburit mer vikt vilket är en essentiell del av systemet som bör hållas så låg som möjligt.
Lithium-polymer batterier eller LiPo batterier har många fördelar över andra batterityper på marknaden. Den låga vikten kombinerat med hög energidensitet och ett högt volttal gör att produkten passar väl in i sensorsystemet med hänsyn till systemets användningsområde.
Micro SD kort & Micro SD läsare
Utifrån kraven på att systemet ska klara långa körningar i Australien med tillräcklig lagringskapacitet föll valet av systemets lagringsmedia på ett Micro SD kort med 128 GB lagring. Micro SD kortet kan hantera stötar och vibrationer bättre än en HDD samtidigt som volymen samt vikten jämfört med en SSD var fördelaktigt [4]. Med 128 GB lagring fanns det gott om marginal för att möta kravspecifikationen samtidigt som systemet blev väldigt framtidssäkert och kan hantera tillägg av fler sensorer eller ökad uppdateringsfrekvens i framtiden. Denna typ av lagring innebär också enkel uppgradering efterhand ifall storleken på kortet i framtiden skulle behöva ökas, det går snabbt och enkelt att ta ut kortet och stoppa i ett annat.
Tanken var att kortet skulle kopplas ihop med Micro SD läsaren som beställdes vid samma tillfälle som Micro SD kortet. Denna komponent saknades tyvärr när resterande komponenter levererades och var även slut i lager hos samtliga återförsäljare. För att lösa problemet köptes en vanlig SD läsare in samt en SD till Micro SD adapter. Denna ändring medförde ingen skillnad i systemets prestanda.
Varningssystem via LED-dioder
Ett bra sensorsystem kräver bra feedback från systemet till föraren gällande driftstatus. Skulle en eller flera sensorer sluta fungera under körning är det viktigt att föraren blir medveten om detta på ett så tydligt sätt som möjligt. En enkel och informativ lösning som valts var att använda ett varningssystem med hjälp av LED-dioder.
Eftersom låg strömförbrukning är en prioritet för systemet har varningen utformats så att den endast uppstår vid fel och inte tvärtom. En annan logisk lösning hade varit att en grön lampa lös så länge systemet fungerar, och senare skiftar till röd färg så fort en eller flera sensorer inte längre kan nås av STM32 kortet. Problemet med detta var att strömförbrukningen, om än låg, trots allt blev en tillräckligt stor variabel i påverkandet av drifttid att en annan lösning valdes. En ur batterisynpunkt bättre lösning som valdes var istället att endast låta lampan lysa vid fel, och låta den vara släckt resterande tid. Detta resulterade i mindre strömförbrukning från LED-dioderna.
En negativ aspekt med detta val var exempelvis om huvuddatorn skulle sluta fungera, i den situationen kommer inte lampan lysa och föraren skulle först bli medveten om detta förrän senare. Trots detta anses risken att detta händer vara tillräckligt låg för att motivera denna lösning som resulterar i mindre strömförbrukning.
Röda dioder valdes eftersom de generellt körs på lägre volt än andra färger vilket innebär lägre energiförbrukning och längre drifttid för systemet.
Kopplingsdäck & experimentkort
Under arbetets gång har ett tiotal olika konfigurationer av sammankopplingar av komponenter skapats. Detta var nödvändigt för inlärning samt förståelse av systemets enskilda komponenter och hur de fungerade tillsammans. Detta hade inte kunnat göras utan de kopplingsdäck som köptes in. Eftersom det slutgiltiga systemet innefattar fyra olika sensorer och nästan tio komponenter krävdes ett av de större kopplingsdäcken. Det kunde köpts in ett ännu större kopplingsdäck, ett sådant kopplingsdäck skulle dock blivit aningen otympligt.
Det är dock möjligt att sammankoppla två kopplingsdäck, vilket gör det enkelt att själv bygga ihop ett större kopplingsdäck vid behov. På grund av detta valdes ett kopplingsdäck med storleken 840 anslutningar. Detta var stort nog för göra åtskilliga tester på. När systemet närmade sig sin slutgiltiga byggdes det ihop på två kopplingsdäck som blev grunden för det fullständiga systemet.
möjligt att fästa dem i exempelvis en platta eller en låda med hjälp av skruv eller dylikt. Detta var dock inget som utnyttjades i projektet. En annan lösning som utnyttjades var istället att placera hela systemet i en specialanpassad låda. Lådan gjordes i en 3D skrivare och skapade ett slags skyddshölje för systemet.
Voltregulator
MCP1700 voltregulatorn kopplades tillsammans med HX711 lastcellsförstärkaren som i sin tur var kopplad till lastcellerna. Voltregulatorn var inkluderad för att stabilisera spänningen som lastcellerna matas med. Detta sker genom att regulatorn ger ut en linjär och stabil spänning. Voltregulatorn förbättrar lastcellernas läsningar genom att minimera störningar i spänningen, detta bidrar till att i slutändan skapa mer korrekta resultat från lastcellerna.
Klocka
Detta var en komponent som inte var med i det uttänkta systemet vid projektets start, detta på grund av att GPS kortet redan innehåller en inbyggd klocka. GPS kortet var tänkt att hålla översikt på tiden och ge systemet ett klockslag vid varje läsning från sensorerna. I och med att GPS kortet exkluderades från det sensorsystemet skapades en nödlösning. En klockmodul köptes in och implementerades för att ersätta tidsfunktionen som fanns i GPS kortet. Klockmodulen DS1302 fungerade precis så som GPS kortets klocka var tänkt att fungera.
5.3 Vilket format av datan ger bäst lagringsmöjlighet med hänsyn till
prestanda och lagringskapacitet?
Formatet av datan som sparas till Micro SD kortet skulle kunna undersökas ytterligare. Det är inte säkert att formatet som valts behöver vara optimalt. Beroende på hur systemet i
framtiden kommer utnyttjas kan formatet på datan behöva justeras. Det skulle också kunna göras en studie som utvärderar effekten som olika format har på systemets prestanda. Om det skulle visa sig att ett annat format bidrar till bättre prestanda skapas det mer initiativ att ändra formatet.
![Figur 1. Krafter hos en stötdämpare vid testkörning [13].](https://thumb-eu.123doks.com/thumbv2/5dokorg/4567797.116775/10.892.150.751.820.1040/figur-krafter-hos-stötdämpare-testkörning.webp)
![Figur 4. STM32 Black Pill. Mindre till storlek jämfört med både Raspberry Pi 4 och Arduino Uno [44]](https://thumb-eu.123doks.com/thumbv2/5dokorg/4567797.116775/13.892.206.655.423.685/figur-black-pill-mindre-storlek-jämfört-raspberry-arduino.webp)

![Figur 9. Lastcell [23].](https://thumb-eu.123doks.com/thumbv2/5dokorg/4567797.116775/17.892.136.725.265.516/figur-lastcell.webp)
![Figur 12. Mikrostrukturen hos en accelerometer [8].](https://thumb-eu.123doks.com/thumbv2/5dokorg/4567797.116775/18.892.134.589.335.680/figur-mikrostrukturen-hos-en-accelerometer.webp)
![Figur 14. Mikrostrukturen hos ett gyroskop [8].](https://thumb-eu.123doks.com/thumbv2/5dokorg/4567797.116775/19.892.135.539.769.1046/figur-mikrostrukturen-hos-ett-gyroskop.webp)
![Tabell 9. ISO/IEC 8859-1 [20].](https://thumb-eu.123doks.com/thumbv2/5dokorg/4567797.116775/23.892.140.727.136.700/tabell-iso-iec.webp)