Statens väg- och trafikinstitut (VTl) - Fack : 58101 Linköping E i n d 0 Nr 48 - 1977 National Road & Traffic ResearchInstitute : Fack - S-58101 Linköping : Sweden Kisset Se 00% 2 fr P et
' UtvecklmgavkorS|mu|at0r
Delrapport Spektralanalys och forslag ,
till syntetisk generermg av fordonsbuller
Statens väg- och trafikinstitut (VTI) ' Fack ' 581 01 Linköping National Road SL Traffic Research Alnstitute'- Fack - S-581 01 Linköping - Sweden
Utveckling av körsimulator'
Delrapport: Spektralanalys och förslag
till syntetisk generering av fordonsbuller
45
av Jan Andersson
FÖRORD
Detta är ett examensarbete vid Institutionen för Fysik
och Mätteknik (IFM), Linköpings Tekniska Högskola,
utfört för statens väg- och trafikinstituts räkning. Rapporten är den fjärde i serien "Utveckling av körsi-mulator". De tidigare utgivna delrapporterna är:
Nordmark, Staffan (oktober 1976): Matematisk fordons-modell, VTI Meddelande nr 4.
Bergdahl, Bengt-Göran (oktober 1976): Förslag till
styr-strategi för rörelsesystemet vid simulering av
hori-sontella accelerationer, VTI Meddelande nr ll.
Lidström, Mats (november l976): Hybriddatorprogram för bilens longitudinella dynamik, VTI Meddelande nr 12.
Arbetet har utförts vid VTI med hjälp av medel, som
ställs till förfogande över tranSportforskningsdelega-tionens budget med en stor del instrument till låns
från Dataton AB Och IFM. Lennart Strandberg och
Mats Lidström vid VTI har gett god handledning. Linköping i juni 1977
Jan Andersson
U) 0.. ) . b a b s b ub U ' I U ' I U ' I U ' I U W U ' I U T N N N N N N N N N Q O U T b W N l -J m U 1 L n @ o r o H INNEHÅLLSFÖRTECKNING Förord
UTVECKLING AV KÖRSIMULATOR. Projektbeskrivning
SUMMARY
SAMMANFATTNING
INLEDNING
ÖVERSIKT AV OLIKA LJUDKÄLLORS INVERKAN
Motorblocket Kontakt med Väg
Transmission
Luftintag och avgassystem Kontakt med omgivande luft Fläkt och generator övriga ljudkällor Ingående parametrar MÄT- OCH ANALYSFÖRFARANDE Registrering Analys MÄTRESULTAT
Motor- och transmissionsljud Vägljud
Däckskrik
REKOMMENDATIONER INFÖR UPPBYGGNAD AV LJUD-SYSTEM Kabinens utformning Placering av högtalare Motorljud Transmissionsljud Vägljud Ljud från våt vägbana Insugnings- och avgasljud
VTI MEDDELANDE 45 Sida II O N O ' N O W U' l U ' l r b d -B WN 00 11 14 14 20 20 22 23 23 25 28 29 31 32
Vind- och bakgrundsljud
Ingående parametrar
REFERENSER
Bilaga A. Apparatteknisk beskrivning Bilaga B. Frekvensspektra
Bilaga C. Manual för ljudsystem variant l
VTI MEDDELANDE 45
33 34 35
UTVECKLING AV KÖRSIMULATOR. Projektbeskrivning
Vid institutet har man sedan länge arbetat med att
för-bättra samspelet mellan förare, bil och väg. Här finns dock många angelägna problem, som enbart kan studeras i en förhållandevis komplicerad körsimulator. Någon lämplig sådan finns inte kommerSiellt tillgänglig.
Där-för utvecklas nu vid VTI en körsimulator Där-för manöver-dynamisk forskning.
Simulatorn kommer bl a att kunna utsätta försöksperso-nerna för realistiska, väl specificerade och
repeter-bara trafiksituationer. Genom att körprestationen också
registreras i detalj bör det vara avsevärt lättare än i verklig trafik att urskilja skillnader mellan de
olika åtgärder som jämförs (t ex inom förarutbildning,
fordonskonstruktion eller Vägunderhåll).
Körsimulatorn kan indelas i fyra delsystem:
Förarplats avSkild från laboratorierummet med manö-verorgan, instrument samt fyra högtalare för motor-, vind- och däcks/vägljud.
Visuell omvärldspresentation. Central färgbild
(i 20 ä 25O horisontellt) tas upp från modellandskap
med servostyrd TV-kamera och projiceras på
kabin-väggens insida. Som komplement kan man utnyttja skuggprojektion från servostyrda ridåer med mönster som antyder vägbana, terräng och himmel för att
kör-hastighet, gir- och krängrörelser skall kunna
urskil-jas med det perifera seendet.
Rörelsesystem. De krafter som påverkar förarens
känsel- och balanssinnen vid fartändring, kurvtagning
och girrörelser simuleras genom att kabinen vrids i olika riktningar. Som exempel kan en känsla av4 konstant retardation åstadkommas genom att en del av tyngdkraften är riktad framåt då kabinen lutas
enligt figuren.
Datorsystem. Med hjälp av specialutvecklade program beräknar VTIs hybriddator (EAI Pacer 600) hur
ratt-ljudeffekter,
kabinrörelse skall påverkas av försökspersonens motstånd, visuell presentation och
manövrer. Inga märkbara tidsfördröjningar får
upp-träda. Fordonets egenskaper, vägfriktionen etc kan varieras av datorn mellan eller under försöken.
Utvecklingen sker med hjälp av medel, som ställs till förfogande över transportforskningsdelegationens budget, samt med institutets medel för egen FoU. Arbetet redo-visas successivt i institutets dokumentserier under den gemensamma rubriken "UTVECKLING AV KÖRSIMULATOR".
RÖRELSER FÖR TV-KAMERA OCH OMVÄRLDSBILD HYBRID DATOR
__9
'o
\\\;:;;\\ __»PERIFER SKUGGBILD ..'EAI
__
_, KABINRORELSE
\
PACER
H RATTMOMENT , INSTRUMENT,
6
600
g_ MANÖVERO RGAN
LJUD
DevelOpment of a driving simulator
Part report: Spectral analysis and synthetic generation
of vehicle noise
by Jan Andersson
National Swedish Road and Traffic Research Institute Fack
8-581 01 LINKÖPING Sweden
SUMMARY'
The present report is describing the connections between different vehicle parameters and the vehicle noise with the purpose to generate realistic noise in a driving simulator under construction at the National Swedish
Road and Traffic Research Institute.
A brief study of the noise generation sources inside a car (Volvo) is completed by a spectral analysis of the noise using a time compression analyzer. Comparisons of spectra at different vehicle speed , engine speed etc show that a great number of discrete frequencies
characterize the engine noise. The most significant of
those can be identified as the combustion frequency. The vibrations generated by the wind and the road
sur-face creates a speed dependent noise without any charac-teristic frequencies but with a broad bandwith.
Finally the report discusses how to generate synthetic vehicle noise. By controlling sinusoidal- and noise generators, filters and amplifiers with vehicle para-meter values a realistic reproduction of the vehicle noise ought to be possible. The most important vehicle parameters are engine speed, engine torgue, vehicle
speed, wind vector, wheel rotational speed, slip,
mechanical resonances in car body and sound resonances
within the cab.
II
Utveckling av körsimulator
Delrapport: Spektralanalys och förslag till syntetisk generering av fordonsbuller
av Jan Andersson
Statens Väg- och trafikinstitut (VTI)
Fack \
581 01 LINKÖPING
SAMMANFATTNING
Vid Statens väg- och trafikinstitut utvecklas en kör-simulator för manöverdynamisk forskning. För att ge föraren av simulatorn information och känsla av äkta bilkörning krävs bl.a ett ljudsystem.
Spektralanalyser,med en tidkompressionsanalysator, av bullret inuti ettmotorfordon och ett kort studium av de ljudgenererande källorna har gjorts. Ljudspektrat vid olika hastighet, varvtal etc. visar att ett stort antal diskreta frekvenser, där motorns explosionsfrek-vens är den starkaste, karakteriserar Imotorljudet.
Kontakten med väg (min luft genererar l huvudsak ett
bredbandigt brus.
De parametrar som styr spektrats utseende är bl.a
motorvarvtal, motormoment, belastningsmoment, fordonets
hastighet och riktning relativt luften, hjulens rota-tionshastigheter, friktionsutnyttjande och resonanser i
chassi, kaross och kabinø
En modell, uppdelad i block som motorljud, transmissions-ljud, vägljud etc, för generering av fordonsbuller inuti en simulatorkabin föreslås. Genom att styra ton- och
brus-generatorer, filter, förstärkare etc, med de ovan
beskrivna parametrarna, bör en god reproduktion av
fordonsbullret erhållas."
INLEDNING
Vid bilkörning får föraren en mängd information genom
sin hörsel, t ex information om
- färdhastighet
- motorvarvtal
- motorns kondition
plus en del information som också fås ur bilens rörelse
tex
- bilen glider i sidled (däcken skriker) - hjulen törnar emot en trottoarkant
I en körsimulator krävs det ett ljudsystem för att ge föraren denna information. Dessutom maskerar det effek-tivt alla de icke önskade ljud som genereras av kör-simulatorns hydraulik o dyl.
Målsättningen med arbetet har varit att finna en modell för ett motorfordons buller, och ge rekommendationer för hur denna modell skall realiseras i en
hybriddator-styrd hårdvaruenhet.
För att få kunskap om billjudets karaktär har ljudet
inuti ett motorfordon spektralanalyserats.
Undersök-ningen har dock omfattat endast ett fordon, en Volvo
l42, årsmodell 1972.
Mätningarna har gjorts vid olika varvtal, hastighet etc, men inte vid alla kombinationer av dessa. Dessutom har vissa situationer som t ex övervarvning och kraSch av naturliga skäl inte undersökts. De brister som här har uppstått har till en del täckts av ett litteratur-studium i ämnet.
ÖVERSIKT AV OLIKA LJUDKÄLLORS INVERKAN
Merdelen av de undersökningar som tidigare har gjorts
i ämnet har haft som målsättning att lokalisera och
och identifiera fordonets olika bullerkällor. Detta
för att få vetskap om var bullerdämpning gör mest nytta,
till skillnad från detta fall där bullret i stället skall reproduceras.
Mätmetoderna kan skilja avsevärt, de intressantaste metoderna är bredbandanalys och framför allt smalbands-analys, där information fås om frekvensinnehållet. De flesta undersökningar beskriver dock en ljudkällas ljudnivå mätt i dB(A) som funktion av någon parameter t ex varvtal. Även detta är av intresse för att kunna reproducera ett naturtroget ljud.
Enligt Aspinall, Daniels m fl finns det följande
ljud-källor i ett motorfordon
- motorblocket
- kontakt med väg
- transmission
- kontakt med omgivande luft - fläkt och generator
- skrikande bromsar och däck
- gnissel och knakningar i chassi och kaross - kraschljud och rullande punkterat däck - signal
- yttre trafikljud
Motorblocket
Motorblocket består av ett stort antal delar som vid rörelse genererar ljud från t ex:
- förbränning - kolv
- ventiler
- vevaXel
- kamaxel med transmission - oljepump med transmission
- transmission till fläkt och generator - glapp i lager, stötstänger etc
Alla de frekvenser som genereras i motorblocket är
varvtalsberoende. I en fyrtaktare gör varje cylinderkolv
två cykler per explosion. Är då motorn fyrcylindrig fås
förbränningsfrekvensen genom att dividera antalet varv
per minut med 30. En fyrcylindrig tvåtaktare har en
dubbelt så hög explosionsfrekvens.
Hur stark den* akustiska utstrålningen, blir från motorn beror på godsets struktur och enligtOpitz /12/ på
motorns effekt. Opitz säger att en ökning i motoreffek-ten med en lO-pomotoreffek-tens ger en ökning med 10 dB(i15) i ljudtrycksnivå. Anledningen till detta är att den ut-strålande ytan ökar. Om två motorer med samma effekt jämförs, är den motor med lägst varvtal för maxmoment
tystast.
Enligt Priede /13/ består motorknackningar av frekvens-komponenter i området 500 - 1500 H2.
Kontakt med vag
Vägbanan kan vara av asfalt, betong eller grus. Den kan vara torr, vattenbelagd eller snö/isbelagd. Eng-man /5/ säger att det skiljer 2 dBA mellan sämsta och
bästa beläggning vid torr vägbana, medan att vid våt
vägbana inte skiljer något. Vid Övergång från torr till Våt vägbana höjs mellan- och högfrekvent buller med 3 dB.
Rathe /l4/ hävdar att vid körning på våt vägbana erhålls
ett bredbandigt brus över 1 kHz. Vägljudet ökar då mellan 8 och 15 dB beroende på vägbana jämfört med torrt under-lag.
Enligt Callow /3/ ökar Vägljudet på en grov vägbana med 6 dBA per hastighetsfördubbling.
Det viktigaste bidraget till Vägljudet ger enligt Goodwin däckribbornas kontakt med vägen. Priede /l3/ viSar att hastighetsberoende harmoniska frekvenser finns mellan 20 och 200 Hz ca 15 dB lägre än förbrännings-frekvensens ljudnivå.
Transmission
Fordonets transmission delas upp i - växellåda
- kardan
- differential
Frekvenskomponenterna i växellådor karakteriseras enligt Groover /8/ av:
- antalet tänder på de inverkande kugghjulen
- varvtalet
Amplituden bestäms av: - kuggarnas form
- varvtalet (en fördubbling av varvtalet ger en höj-ning på 6 dB)
- anbringad kraft på kuggarna (en fördubbling av motor-momentet ger en höjning på 3 dB)
- växellådans egenresonanser
- växellådans yttre dimensioner (dessa bestämmer den
akustiska utstrålningens effektivitet)
Luftintag och avgassystem
Ljudnivån från luftintag och avgassystem har enligt Priede följande samband med motorvarvtalet.
Ljudnivå dBA = 45 log N + K
där N är varvtalet och K en obestämd parameter.
Insugningsljudet genereras av ventilernas öppnande och stängande. Från obelastad till fullt belastad motor stiger ljudnivån med 20 - 25 dB.
Avgasljudet genereras av att gas plötsligt strömmar ut i avgasSystemet då ventilerna öppnas. Vid en ändring från obelastad till fullt belastad motor stiger
ljud-nivån med 15 - 20 dB.
Kontakt med omgivande luft
Enligt /15/ beror vindljudetsljudnivå på fordonets hastighet relativt luften.
Ljudnivå dB(A) = 55 log V + K
där V är fordonets hastighet relativt luften oCh K en obestämd parameter.
Fläkt och generator
Fläkten kan antingen vara fast inkopplad, eller så kan
dess inkoppling vara termostatreglerad. Ofta är
utväx-lingen sådan att fläkten har något högre varvtal än motorn. Enligt Sharland /l7/ består fläktljud av två
komponenter, ett bredbandigt spektrum och ett diskret spektrum. Det diskreta består av den fundamentala frekvensen (rotationsfrekvens gånger antal block) och dess övertoner (de tre första är signifikanta).
Övriga ljudkällor
Bromsljud orsakade av kontakt mellan bromsbackar och
trumma/skiva består av ett antal diskreta frekvenser i
området 2 - 3 kHz. Däckskrik undersöks i kapitel 4.3.
Ingående parametrar
De parametrar som styr ljudspektrats utseende kan
sam-manfattas i:
- motorvarvtal
- motormoment
- belastningsmoment
- gaspådrag
- motorns yttre dimensioner
- fordonets hastighet relativt luften - bilprofil
- höjd över underlag
- hjulens rotationshastigheter - Vägprofil
- friktionsutnyttjande
- däckprofil
- kabinresonánser
- resonanser i chassi och karosseri
MÄT- OCH ANALYSFÖRFARANDE
Den totala ljudbilden i ett fordon innehåller
perio-diska, ioke periodiska och slumpmässiga ljud i en mängd kombinationer. Genom att arbetet inneburit att finna ett motorfordons ljudspektra, för att senare kunna
reproducera det, krävs kännedom om de viktigaste frek-venskomponenterna. Genom smalbandsanalys erhålls denna kännedom. Vid mätningarna användes därför en analysator av tidkompressionstyp.
Registrering
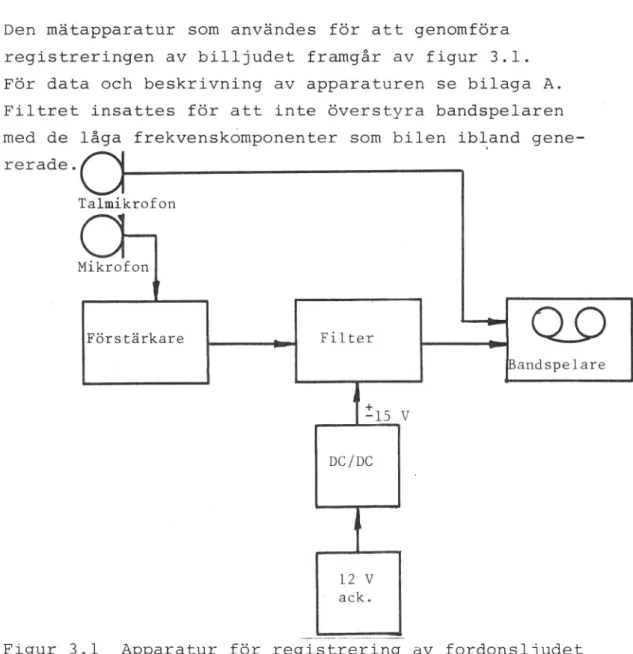
Den mätapparatur som användes för att genomföra
registreringen av billjudet framgår av figur 3.1.
För data och beskrivning av apparaturen se bilaga A. Filtret insattes för att inte överstyra bandspelaren med de låga frekvenskomponenter som bilen ibland
gene-rerade. Talmikrofon Mikrofon
'""" Q9
Förstärkare _______ Filter Bandspelare1:15 V
DC/DC 12 V ack.Figur 3.1 Apparatur för registrering av fordonsljudet
Utförande
Mätningarna utfördes inuti en automatväxlad (3 växlar
framåt) Volvo 142, årsmodell 1972. Mikrofonen var pla-cerad i passagerares huvudhöjd.
Ett plant vägavsnitt (700 m) och därefter ett svagt
nedförslut (400 m) vid Malmslätt utvaldes. Alla
mät-ningar med belastad motor utfördes där, de övriga
gjordes i en lokal på VTI.
De kombinationer av olika varvtal, hastighet, växel
och belastning vid Vilka mätningar gjordes visas i figur 3.2. I figuren kan det för en viss hastighet och
en viss växel förekomma flera olika varvtal. Hastigheten
är ungefärlig medan varvtalet får betecknas som exakt.
lO
Belastning
Hastighet Varvtal Plan väg Uppför Nedför
Drivande
Motor-Växel (kmh) (rpm) Ingen motor broms Drivande motor
0 0 700 x 0 0 1 000 x 0 0 2 600 4,1 0 0 2 500 x 0 0 3 000 x 0 0 @ 000 4.2 0 *40 0 x 0 60 0 x 0 80 0 83 0 100 0 BS 1 40 2 600 4 4 4.5 1 40 2 800 x 1 40 3 000 x x 1 .60 4 400 B7 B8 1 60 4 500 x 1 60 4 800 x x 2 40 1 700 x B9 B10 2 40 2 000 x 2 60 2 700 x 2 60 2 800 x 2 60 2 900 x 2 60 3 000 X x 2 80 3 600 B3, B4 B4 B11 B12 2 80 4 000 x 2 100 4 600 B5 B1 B13 3 40 1 350 x 3 40 1 400 x x 3 60 2 000 B14 x 3 80 2 600 x 3 80 2 700 X 3 100 3 300 x 3 100' 3 400 B2 3 100 3 500 x 3 120 4 200 x
x står för utförd, men ej redovisad mätning Figur 3.2
VTI MEDDELANDE 45
ll
Vid mätningarna gällde: Däcktyp: Michelin X
Ringtryck: Enligt instruktionsbok Tank: Fylld till ca 3/4
Vägbana: Slät asfalt
Väderlek: Torrt, varmt med obetydlig vind
För varje mätning kördes bilen upp till ett visst varv-tal eller hastighet. Billjudet registreras oavbrutet på ena kanalen. Då varvtal etc stabiliserats kommen-terades detta på den andra kanalen, samtidigt som varv-tal, hastighet, växel och dämpning på mikrofonförstär-kare noterades. Sedan en slutkommentar vid
vägavsnit-tets slut.
Vid de tillfällen då den absoluta ljudnivån var av intresse spelades en referens (86,3 dB) in. Referensen var någotwiistorderadxman detta försummades.
Störkällor från bandspelardrivning och från VTIs lo-kaler registrerades för att kunna subtraheras från motorljudet vid analysen.
Analys
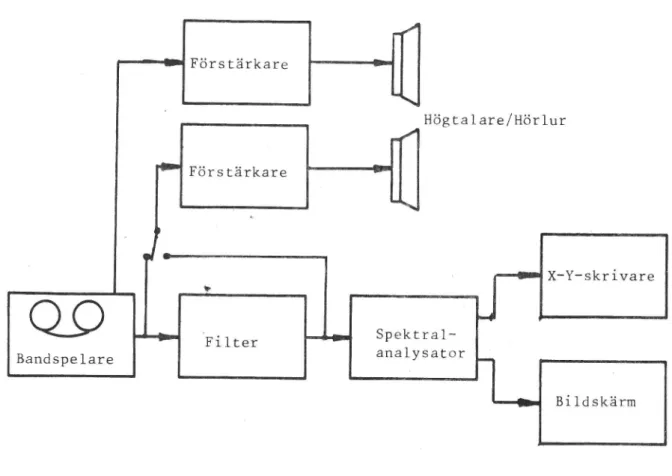
Den apparatur som användes vid analysen av det regi-strerade billjudet visas i figur 3.3. För data och beskrivning av apparaturen se bilaga A.
12 ---I4Förstärkare Högtalare/Hörlur Förstärkare
_J_- Spektral" .Filter analysator I I bJ-HI- X-Y-skrivare U? Bandspelare Bildskärm
Figur 3.3 Apparatur vid spektralanalys av motorfordons-ljudet
Filtret korrigerade den dämpning som gjordes vid
registreringen.
Utförande
Vid spektralanalysen studerades först spektrati.real-tid. Mycket oregelbundna ändringar i amplitud förekom under varje mätning. Det föreföll vara svårt att ur dessa spektrum dra några slutsatser. Vissa frekvensers fluktuationer hördes dock tydligt och kunde identifieras på detta sätt. I vissa svåra fall tillgreps exponen-tiell medelvärdesbildning.
För att eliminera bruset för att lättare läsa ut diskreta frekvenser gjordes medelvärdesbildningar av ett antal spektra (16 eller 256 st). Breda tOppar kan
uppträda i ett sådant spektra. Detta kan bero på att
l3
hastighet och varvtal varierat något.
Vid analysen användes logaritmisk skala för amplitud, detta för att lätt kunna jämföra olika toppars ljud-nivå. Frekvensskalan var linjär, vilket underlättade identifieringen av harmoniska övertoner.
Varje intressant:spektrumjgbottades efter analysen ut
på X-Yeskrivaren. Väl definierade toppars frekvens
skrevs ut på det utskrivna spektrate
l4
MÄTRESULTAT
Motor och däckens kontakt med vägen är de två viktigaste ljudkällorna. Båda är vibrationsexciterande och det
fås amplitudmoduleringar mellan olika varvtal, kuggin-grepp etc och deras övertoner.
Dessa vibrationer fortplantas dels genom upphängnings-anordningar, chassi, kaross o dyl och dels direkt genom luften.
Genom denna modulering som skapar nya frekvenser och
denna excitering av frekvenser med ursprungligen låg
amplitud till fullt märkbara ljudnivåer, gör att många frekvenser inte kan hänföras till någon ljudkälla. Det försvårar en identifiering av frekvenstOpparna.
Förfarandet att med hjälp av modulering flytta på ett spektrum i frekvenSplanet kallas heterodyn-principen.
Utvärderingen gjordes så att varje spektra som hade t ex en parameter lika med något annat jämfördes.
Motorljud
Obelastad motor
Mätningarna utan belastning Visar tydligt det spektrum som genereras av motor, fläkt och generator. Se figur 4.1 och 4.2.
15
"4" :1-8
40th; {ref.86dB
,41
(00 800 600 [700 :AOC
Figur 4.1 Spektrum vid obelastad motor (2000 rpm)
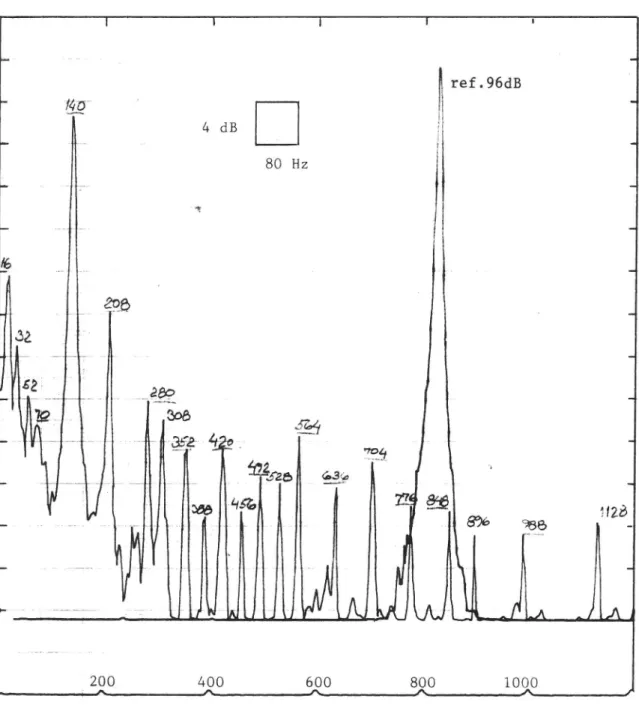
16 ref.96dB 4 dB . . . q ui s »_ M 80 Hz
200. 400 600 8 0 1000 ) : ,L A_
Figur 4.2 Spektrum vid obelastad motor (4000 rpm)
17'
Observera de olika.frekvensskalorna.prparna kring 14, 16, 32 och 50 Hz är yttre störkällor. Den starka frek-vensen 292 Hz visar sig vara en kabinresonans. Vid
jämförelser mellan Spektra gjorda under lika förutsätt-ningar visar det sig att frekvensinnehållet är detsamma,
medan vissa varvtalsövertoner kan variera i5 dB. Föl-jande slutsatser kan dock göras
- motorn generar huvudsakligen diskreta frekvenser
- varvtalets 1:a överton dominerar, ca 20 dB starkare
än de övriga frekvenserna
- vid ökat varvtal ökas.de högre frekvensernas bidrag Bidragen från komponenter som roterar med halva
varv-talsfrekvensen moduleras med i första hand varvtalets 3:e till 8:e överton.
motorspektrum.
ass
Figur 4.3 visar ett idealiserat
"förbränning _..-0 dk \\\\ Q\\\ \\ \ 1;» 0\ \\ \\ \\ \\ \\
\ D-säpdring vid ökat varvtal
\\\ 4,' x \
l
rr
\ \\Hz
Figur 4.3 Idealiserat motorspektrum
18
§§l§§§ê§-99§9§
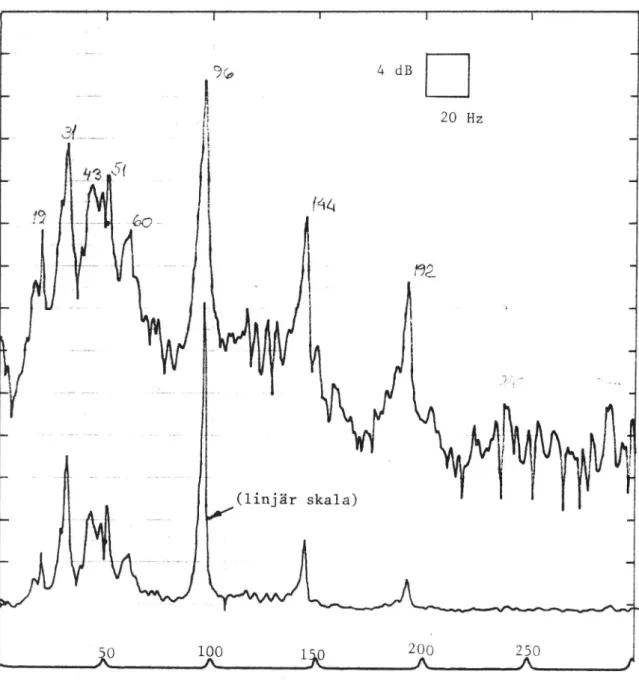
Dessa mätningar gjordes genom att köra fordonet på plan och lutande vägbana. Bidrag från kontakt med Väg-och lufttransmission etc höjde ljudnivån betydligt. Det visas i figur 4.4 och 4.5.
99 4 dB 20 Hz n u.
(444
?92.
-WWW å
(linjär skala)Figur 4.4 Spektrum vid 40 kmh, 2600 rpm, växel 1 och uppförslut
19
50 100 150 200 250 )
Jul J\_l JL jk, .IL
Figur 4.5 Spektrum vid 40 kmh, 2600 rpm, växel och nedförslut
Den enda skillnaden mellan figurerna ovan är att varv-talets 2:a och 3:e överton sänks i nedförslut. Flera andra jämförelser mellan spektrum från plan, väg, uppförs- och nedförslut visar att flera av varvtalets övertoner (3:e och uppåt) höjs vid ökad belastning. Flera jämförelser mellan spektrum tagna för olika
varv-tal men lika hastighet (se bilaga Bl, BZ) visar tydligt att vid ökat varvtal ökar de höga frekvensernas
inverkan. Förutom de tydliga diskreta frekvenserna
bidrar motor och transmission med ett tätt spektra av frekvenser, som närmast kan betraktas som bredbandigt brus (bilaga B3). På liknande sätt bidrar det som hör
20
ihop med en förbränning, insugning, avgasutsläpp etc,
men i lägre grad (bilaga B4).
Vid vissa varvtal på utgående axel kommer kardan med tillbehör i resonans (bilaga BS). Detta gäller endast då motorn driver fram bilen. Vid motorbroms kan feno-menet ej upptäckas. Då tändningen slås av under körning sjunker explosionstOppen med ca 20 dB och dess första
överton med 8 dB (bilaga B4).
Vägljud
Några diskreta hastighetsberoende frekvenser kunde ej med säkerhet upptäckas i spektralanalyserna, trots att de stundtals upptäcks av örat. Orsaken till detta kan vara att huvuddelen av vägljudet leds vidare genom däck, fjädring, steg, axlar etc till chassit. Denna överföringsfunktion är inte känd vilket gör det svårt
att följa en hastighetsberoende frekvenskomponent, som
då kan variera kraftigt i amplitud. Se vidare kapitel 5.4 och 5.5. Detta hade underlättats med cepstrumanalyser
men resurser saknades till detta. Cepstrum innebär att
amplitud och frekvens som funktion av någon parameter kan fås utskrivet som ett "tredimensionellt" diagram. Lämpligt hade då varit att välja hastighet som parameter.
Däckskrik
Fordonet kördes i en cirkel i ca 50 kmh. Under analysen noterades genom att lyssna på det registrerade ljudet vilka toppar som genererades av däckens glidande rö-relser. Ett spektrumxpuilämpligt vald tidpunkt
plot-tades ut. Figur 4.6 visar att topparna 900 och 1020
och deras övertoner 2 x 1020 och 3 X 900 ger det största bidraget till däckskriket.
dB Däckskrik (grundtoner) (övertoner) 0 här i
1" 1
i
J
.J
'
1
1'
i
1
l
HzFigur 4.6 Spektrum över däckskrik
Frekvensen höll sig hela tiden konstant, men amplituden på grundtonerna varierade kraftigt. Vid maximal nivå 3 dB starkare än förbränningsfrekvensens nivå.
22
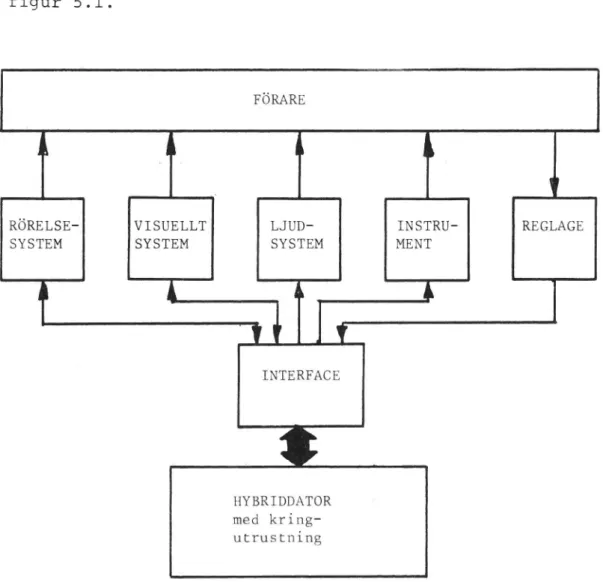
REKOMMENDATIONER INFÖR UPPBYGGNAD AV LJUDSYSTEM
Ljudenheten bör vara en separat, från hybriddatorn styrd,
hårdvaruenhet. Ingen återkOppling annat än den som sker
genom förarens manövrering av reglagen behöver ske. Se figur 5.l.
FÖRARE
RÖRELSE- VISUELLT LJUD- INSTRU- REGLAGE SYSTEM SYSTEM SYSTEM MENT
L
A
:4
i
u v
INTERFACET
HYBRIDDATOR med kring-utrustningFigur 5.1 Blockschema över VTIs planerade körsimulator De flesta parametrar som behövs för att styra ljuden-heten kommer att finnas i analog form. Därför bör ljud-enheten byggas upp med huvudsakligen analog teknik. I samband med utvecklingen av bilens longitudinella dynamik krävdes det en hastighetsreferens. Förutom hastighetsmätaren ger motor- och vägljud föraren den
23
information som behövs för att bedöma hastigheten-I anslutning till mätningarna byggdes därför den hård-vara upp som beskrivs i bilaga C. Denna första variant av ljudsystemet är dock otillräcklig. Detta kapitel
visar var insatser bör göras för att få ett ljudsystem
mer realistiskt ljud.
Kabinens utformning
Ljudupplevelsen skiftar från bilmodell till bilmodell.
Den främsta orsaken till detta är att de ljudgenereran-de källorna är av varierande art. En annan orsak är att bilkabinens isolering och storlek varierar. Detta gör att vissa delar av ljudspektrat dämpas kraftigt medan andra delar kraftigt förstärks på grund av kabi-nens eventuella egenresonanser.
Vid ett byte av fordonsmodell, t ex från fyrtaktare till
tvåtaktare, bör ljudspektrats sammansättning kunna
ändras. Däremot kan ej kabinens inre akustiska egen-skaper ändras alltefter bilmodell. Utformningen av
kör-simulatorns kabin bör därför göras så att de
egenreso-nanser som uppstår är rimliga, dvs att de ligger i
när-heten av de tänkta simulerade fordonens
kabinresonan-ser. Kan kabinen inte göras tillräckligt stor bör en smalbandig förstärkare läggas in som sista länk i
hårdvaran för att åstadkomma dessa egenresonanser. För att eventuella vibrationer och förskjutningar skall låta riktiga dvs metalliska bör kabinen bestå av plåt.
Placering av högtalare
Högtalarna-bör placeras så att en tredimensionell ljud-bild erhålles. Riktningar enligt följande bör kunna
erhållas:
Eys_êy_ligs
Motorljud, fläkt insugning, Vägljud Vindljud Avgasljud Kardanedifferenstialljud Övriga ljud 2482529299_§:â2_§ê§ê22lê2§
Framifrån, snett nedåt (ev.
bakifrån)
Underifrån, runt om
I ansiktshöjd vid
vindrute-stolpar
Bakifrån
Bakifrån, snett nedåt
Från en Obestämd plats i rummet
Detta kan åstadkommas om 4 högtalare placeras i hörnen
av en tänkt tetraeder,
Prov i en liten träkabin
se figur 5.2.
(1,3 x 1,0 x 1,6 m) har visat
att vissa ljud kan uppfattas som alltför påträngande. Försök bör därför göras med högtalare utanför kabinen.
Figur 5.2
VTI MEDDELANDE 45
25
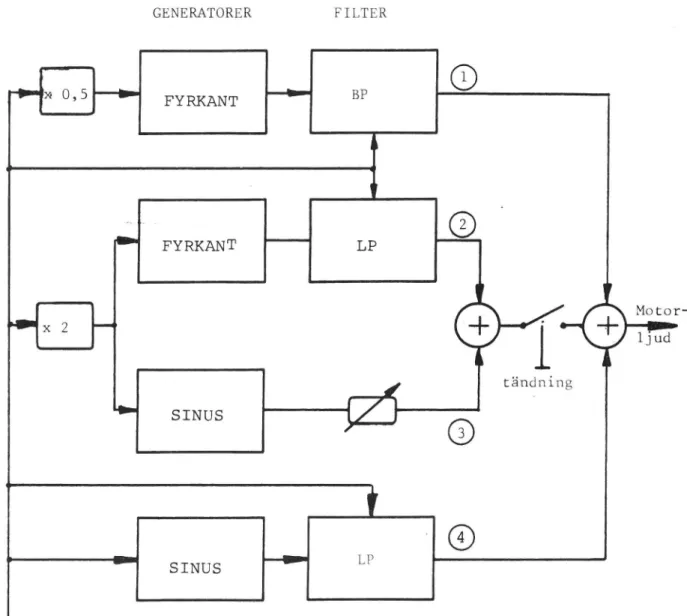
Motorljud
Motorljudet består av ett stort antal diskreta frekven-ser genererade av roterande och stötande rörelfrekven-ser.
Försök har visat att enbart en fyrkantgenerator (grund-ton plus udda del(grund-toner) ger en dålig överensstämmelse med verkligheten. En mer komplex ljudbild måste därför genereras. Det första steget mot en god reproduktion bör därför vara att generera det idealiserade spektrum som Visas i figur 4.3.
GENERATORER FILTER
'rt-t
x 0 5 L-b- FY AN -h- BPo
W!
RK T
"" FYRKANT'
SINUS
SINUS motorvarvtalFigur 5.3 Modell för motorljud
26
Detta kan åstadkommas med
exempelvis fyra tongeneratorer med efterföljande fil-ter, se figur 5.3, styrda av analoga spänningar. Genom att lägga in en brytare efter <:> och <:> som styrs av tändningsnyckeln kan det fall då tändningen slås av under körning simuleras.
Genom att motorn generar spektrum enligt
heterodyn-principen, kan ljudet också reproduceras på liknande
sätt. Försök med en sådan motormodell bör därför göras. Ett tillvägagångssätt är att blanda signalerna (:>,
(:> Och <:> i figur 5.3 med t ex halva varvtalsfrek-vensen, se figur 5.4.
@ c .BLANDARE *--- Motorljud
@
e
:1;;Efg:- t.ex A=O.5
? Motorvarvtal
Figur 5.4
Motormodell enligt heterodynprincipen
27
Enligt kapitel 4 ökar inverkan av höga frekvenser då belastningen ökar. Figur 4.3 visar att detta skulle kunna åstadkommas genom att minska brantheten på ett
LP-filters frekvenskaraktäristik. Vid en realisering
av modellen blir det enklare att flytta LP-filtrets brytfrekvens som funktion av momentet.
Ljudnivån vid tomgång bör vara så kraftig att ett eventuellt motorstopp hörs. Dessutom brukar motorfor-donens tomgång vara något ojämn. Detta kan åstadkommas genom att motorljudet får passera en enveloppgenerator som varierar amplituden enligt figur 5.5. Generatorn triggas lämpligen av en lågfrekvent bruskälla och kopplas in då varvtalet understiger t ex 800 rpm.
Motorljud
ENVELOPP-GENERATOR
6
FILTER Enveloppi
BRUS-GENERATOR
.-| I L t (sek)Figur 5.5 Modell för ojämn tomgång
28
.4 Transmissionsljud
Buller från transmission är liksom motorljudet samman-satt enligt heterodynprincipen. Vibrationer från olika kuggar exciteras och moduleras i hölje, axlar och dy-likt. EfterSom tranSmission sker från motorvarvtal till drivaxelns roterande, blir varvtal och hastighet de viktigaste parametrarna. Det enklaste sättet att reproducera transmiSsionljudet bör vara att dela upp det i två delar. Den första delen, den varvtalsberoende, genereras på samma sätt som motorljudet, eller ingår helt i detta. Den andra delen däremot, den hastighets-beroende, styrs även amplitudmässigt av momentet
(bilaga B3 - BS). Denna hastighetsberoende del som då
simulerar kardan- och differentialljud bör helst gene-reras enligt heterodynprincipen för att få ett tätt spektrum av diskreta frekvenser. Blir detta för kost-samt får ett bredbandigt brus simulera ljudet. Se figur 5.6.
diskret
spektrum LP hastighetsberoende
eller I FILTER ' transmissionsljud
brus moment hastighet
dB Ål
varvtalsberoende r--20 dB/oktav 15-30 dB 4 J///øhastighetsberoende HzFigur 5.6 Modell för transmissionsljud och förhållande
mellan hastighets- och varvtalsgenererat ljud VTI MEDDELANDE 45
29
Vägljud
En enkel modell för vägljud beskrivs i figur 5.7 .
Bruskälla plus filter är en modifierad version av
vä-gens ojämnhets spektrum enligt Sandberg /l6/.
Motorljud
VITT
LP
N
.
BRUS
"'"""""T FILTER
Vägljud
*Hastighet
Figur 5.7 Enkel modell för vägljud
30 Effekttäthetsnivå dB 80 4 - - - -'-I I I I I I I I u _' 1 l spektralfrekvens (EQ
Figur 5.8 Vägbrusets frekvensinnehåll
Enligt Callow /3/ ökar vägljudet med 6 dBA per hastig-hetsfördubbling. Vid en simulering bör därför LP-filt-rets brytfrekvens vara proportionell mot hastigheten. Mätningarna i kapitel 3 Visade att
vägojämnhetsspekt-rat överfördes till chassit genom en resonansrik över-föringsfunktion. En viss del av vägljudet når dock örat direkt genom luften. De lägsta frekvenserna i vägens ojämnhetsspektrum uppfattas som vibrationer och
inte som hörbart buller. Därför skulle en vibrator som styrs av dessa frekvenser öka känslan av vägens närvaro. Placeras denna vibrator någonstans på simulatorns
chassi bör detta simulera det chassiburna vägljudet,
*dessutom är det en fördel om vibrationerna känns i ratten. Förutom detta lågfrekventa buller uppfattar
örat för vissa typer av däck ett antal diskreta
frekven-ser med harmoniska övertoner. Figur 5.9 visar en
mo-dell som tar hänsyn till_dessa faktorer.
.5.
31
VITT
LP
_-0- VIBRATOR
BRUS
FILTER
; vagens OJamn-u .n Chassiburet ljud
' hetsspektra FILTER I uftburet lj Motorljud ' DISKRETA FREKVENSER Hastighet
Figur 5.9 Utförligare modell för vägljud
Däckskrik genereras av sinustoner enligt kapitel 4.3.
§12§_§§å9-2å2_yê9eêeê
Övergång från torrt till vått underlag bör kunna simu-leras enligt /5/ m fl genom att lägga till ett bred-bandigt brus enligt figur 5.10.
32 Vägljud o dB A Våt vägbana
3_8 _
/
\
EILTER
l " 1 KHZ * Filterkaraktäristik . BRUSGEN.Figur 5.10 Simulering av våt vägbana
Insugnings- och avgasljud
Insugningsljudet hörs tydligt vid häftiga gaspådrag
(se kapitel 2.4). Skall denna effekt simuleras krävs
en mer utvecklad motormodell än VTIs nuvarande /9/.
Avgasljudet har ett liknande beroende av gaspådrag och moment. Vid låga varvtal t ex vid tomgång märks ofta avgasljudet. Detta bidrag kan fås genom att som i kapitel 5.3 införa en enveloppgenerator.
33
Vind- och bakgrundsljud
För att föraren skall få en ökad känsla av att sitta
i en bil och inte i en körsimulator, borde det vara lämpligt att lägga in ett bakgrundsljud. Det mest liv-fulla vore trafikbuller uppspelat från bandspelare, 4
dock så onyanserat att någon skillnad mellan
stads-trafik och landsbygdsstads-trafik inte kan upptäckas. Enligt Fält och Johansson /6/ påverkar dock trafikens sam-mansättning inte spektrum i någon nämnvärd grad. Tra-fik vid torr Vägbana kan därför simuleras med brus en-ligt figur 5.ll, vilket torde vara enklare än med band-spelare.
-4 dB/oktav
-20-_30 I I I I I | 7-"
63 125 250 300 1000 2000 6000
Figur 5.ll Simulering av yttre blandat trafikbuller
34
Vindljudet blir märkbart vid högrefartero Beroende på bil kan ljudet vara av skiftande karaktär allt från dovt vindbrus till ett vasst vinande ljud. Ljudet
lokaliseras oftast till oregelbundenheter i karossen t ex vindrutestolpar. Vindljudet genereras lämpligast genom att filtrera Vitt brus. Vilken filterkaraktäristik som är lämpligast bör fastställas genom lyssningsprov.
Ingåendegparametrar
För att realisera dessa förslag krävs följande
para-metrar från hYbriddatorn:
- motOrvarvtal
- motormoment
- belastningsmoment
- fordonets hastighet och riktning relativt luften
- hjulens rotationshastigheter - friktionsutnyttjande
- tändning,på/av - tomgång,ja/nej
För att ljudet skall bli mindre simulatorbetingat bör lågfrekvent (mindre än 15 Hz) brus läggas på signalerna, så att flukturationer på ca 4 dB i ljudnivå kan upp-täckas. Vid uppbyggnaden av hårdvaran är det inte
nöd-vändigt att dessa rekommendationer följs exakt. Vik-tigt är dock att en validering görs, och att denna
sker på samma sätt som i kapitel 3.
/l/
/2/
/3/
/4/
/5/
/6/
/7/
/8/
/9/
/10/
/13/
/l4/
35 REFERENSER Ahlin,pad signalanalys;K, Nilsson, L,3K Tre Konsulter AB, Vaxholm,Reveman, A: Kompendium i tilläm-1973. D.T, Kontroll av trafikbuller genom fordonets
Institute of Sound and Vibration Research, 26, Mars 1969. Aspinall, konstruktion, Southampton 24 -Callow, Report No 1970/4, Association.
G.D, A Survey of the Noise in Private Cars,
MIRA. The Motor Industry Research The Fourier Transform Applied
Ford
Daniels, V.A. Veres, R.E,
to Vehicle Exterior Noise Source Identification,
Motor Co, 760151.
Engman, B, Mattson, M.O, Undersökning av bulleralstring
däck - vägbana med avseende på olika vägbeläggningar, Examensarbete 1975, Chalmers Tekniska Högskola.
K: Försök att simulera
vägtrafik-Examensarbete, Fält, L, Johansson,
buller, Institutionen för vägbyggnad, KTH, l974.
Goodwin, D.W.
study of Origins and Design Parameters". University of Southampton, 1968.
"Low Frequency Noise in Motor Cars - A
Ph.,D. Thesis,
E.C, Anderton, D, Noise and Vibrations in
Second International Power Transmission 1972.
Grover,
Transmissions,
Conference, Paper No 7,
Lidström, M; Hybriddatorprogram för bilens longitudi-nella dynamik; Delrapport i Utveckling av körsimulator, VTI Meddelande Nr 12, statens väg- och trafikinstitut, 1976.
Mclane, R.C, Wierwille, W.W: The Influence of Motion and Audio cues on Driver Performance in an Automobile Simulator, Human Factors, 1975, 17 (5), 488 - 501.
National Physical Laboratory. The Control of Noise. Symposium No 12, London 1962 (H.M. Stationary Office).
Opitz, H: Noise of Gears; Philosophical Transactions
of the Royal Society, London, A, Vol 263 pp 461 - 480,
1969.
Priede, T: Noise and Vibration Problem in Commercial Vehicles; Journal of Sound and Vibration (1967) 5 (1),
129 - 154.
Rathe, E.J: Uber den Lärm des Strassenverkehers. Acustica, Vol. 17 (1966);
/15/
/16/
/17/
36
RRL Report LR 357: A Review of Road Traffic Noise;
Road Research Laboratory, 1970.
Sandberg, U: Vägbanekaraktärisering med avseende på däckbuller; statens Väg- och trafikinstitut, Rapport nr 92, Linköping 1976.
Sharland, I.J.: Sources of Noise in Axial Flow Fans;
Journal of Sound and Vibration (1964) 1(3), 302 - 322.
Bilaga A
KORT APPARATTEKNISK BESKRIVNING
Mikrofon-med förstärkare
Fabrikat: B & K Ljudnivåmätare 2209
böjlig svanhals UA 0196
kondensatormikrofon 4145
Frekvensområde: 5 - 100 000 Hz :0,5 dB, linjär
Utsignal: Fullt mätutslag ger i läge "Batt. (Rec)"
5 V effektivvärde, i övriga lägen 0,5 V.
Spektrumanalysator
Fabrikat::Federalfacientific Corporation model UA-500 Princip: Tidkompressionsanalysator, med möjlighet att
göra aritmetisk medelvärdesbildning»mellan
2n spektra, (n = 0,..., 10).
Analysområden: 10, 20, 50, 100, 500, 1000, 2000, 5000, 10 000, 50 000, 100 000, 500 000.
Upplösning: Nominell bandbredd = analysområde/SOO
Dynamik: 50 dB
Känslighet: 0,1 - 0,3 - 1 - 3 - 10 Vrms för full
ut-styrning.
Anslystid: För ett komplett spektrum = 1 (nominella
bandbredden. '
Utgångar: X- och Y-signaler till OSCillOSkOp och
skri-vare. Amplitud- och frekvensskalorna kan väljas linjära eller logaritmiska.
Skrivare
Fabrikat: Houston Instrument series 200 omnigraphic
XY-recorder.
Bildskärm
Fabrikat: Tektronix 604 Monitor
Varvraknare
Fabrikat: Sandet _Tune-up analyzer
Filter
Fabrikat: Dataton, Stereo Octave Filter 3101.,
Brytfrekvenser: 50, 100, 200, 400, 800, 1600, 3200,
6400 och 12800 Hz.
Dämpning: +l8 till -18 dB/oktav kontinuerligt. Högtalare
Fabrikat: Acoustic Research International, AR-7
Band I
Fabrikat: Ampex Studio Quality Cassete, C90
Band II
Fabrikat: Basf Chromdioxid SM Cassete, C90
Bandspelare I
Fabrikat: TEAC Model R-7OA
Frekvensområde: FM: O - 625 Hz + 1 till -2 dB DR: 100 - 8000 Hz :3 dB
(50 - 8000 Hz :5 dB)
Dynamik: 35 dB eller mer Bandspelare II
Fabrikat: UHER 4000 Report-S
Frekvensområde: 40 - 20 000 Hz :3 dB, direktinspelning
Dynamik: 50 dB
Bilaga Bl Uppförslut, Växel 2, 100 kmh, 4 600 rpm, 256 medelvärdesbildningar. I l l a I I P, _ 52 4 6.3 '56 . :EV/GO A ' 40 Hz b-»m «
Fr
*225
i -ölâ _ 772_ _ Å Holt Wbö '1% __ A 852 0. 6, ,. , 55. ,3080. mm; 1 ,__,_ -200 400 600 800 1000 1200 VTI MEDDELANDE 45Bilaga B2 Uppförslut, Växel 3, 100 kmh, 3 400 rpm, 256 medelvärdesbildningar 4 I I I | I
'
Me.
28 '
4 (iB
Nå?
40 Hz
H 92 "m m.nwwwm -_m_ ,ggøu?32%
L., .-..,4____,. ;. M... V . i -A memm MW 432 ábå i 498 éáo;2%
5 752 <åiá äái Ekb 8%, 'fäN
tyg
200 400 600 800 1000 1200 i_ 1\_ xx. - JK_ ÄJ\D /\; ;AL VTI MEDDELANDE 45Bilaga B3
Plan Väg, växel 2, 80 kmh, 3 600 rpm, l6 medelvärdesbildningar.
Plan Väg, avslagen och urkopplad motor,
exponentiell medelvärdesbildning. 80 kmn, L. N _ :11 0 LO m i)
'v
r- g. ' -<?25"
0 Gay . r- "5 -t _ff_.
§2? _
(E. x? VTI MEDDELANDE 45.- I
.
. _ ñv'Bilaga B4
80 kmh,
16 medelvärdesbildningar.
l. Plan Väg, Växel 2, 3 600 rpm,
2. Plan väg, avslagen men inkOpplad motor med Växel 2,
80 kmh, 3 600 rpm, exponentiell medelvärdesbildning.
a l I v T I 1 r I T ._ oo mm
8
(IQ 00 I\ _ ä 0. - 0 N l\ '-4 _ E . E;E=:L 0 a . o_52!!_=;, _
3:"
t. o Ln 50 Hz V 2? I VTI MEDDELANDE 45 40 0 30 0 20 0 10 0Bilaga B5
1. Plan Väg, växel 2, 100 kmh, 4 600 rpm,
16 medelvärdesbildningar.
2. Plan Väg, avslagen och urkopplad motor, 100 kmh, exponentiell medelvärdesbildning. N r-l m
.a
.r
0 l
m \® 4 v 0 b- » »- w H ü. .- -. .. 0. m @ x q. q - 4p
- o Ln o _ o N q :E 0 ml m i'-0
?9
q _9 0 v * o m N G W20
0
A
100 VTI MEDDELANDE 45Bilaga 36
Störningar uppmätta inuti bil i VTIs lokal. Frânslagen
motor. 16 medelvärdesbildningar. I I I I I I I I I i I I ::3,S;1 1 M M V *J .54
.
i? 4
.4 .r.
»L» u WW 6 .. . ><uEE_ -- .31 ._ V i , . . .n-d;-L i - - _ N N. DDMA ;M m?i m a i _ _ . . 44 (in nu. .i ;0 >'g-49' oä
x--.
4._ W_ _A n i. 4;? ."* a -1-113 N4 i N4 ml '-4 jow r-i r 4 "L m** 1 1 ;i VTI MEDDELANDE 45Bilaga B7
Uppförslut, växel 1, 60 kmh, 4400 rpm, 256
medelvärdes-bildningar. -v VTI MEDDELANDE 45 I I I * I I I 1 I I I I lg l I (j \\ o _ 8 04<r A __ D - a_ 3? C
-w
»
-H
<a{
N ä '-4 - nu* 5 §52 L- 4 -M F _ o 0 h_ _- M_ __- _ § '-4_
__ ,.
N _8.
I"gå
00 _ :I: G 0 V) aa 4 N r'ä
3
G..
_ -_._
.g
*<9
,
8 <
LG 89 .-.w __ ___ q-_ , (Q 3.'2;
?55'
3 4
cs)3?
(0 _M_ V .VN __ ,i"
wa __ ._ HH.--N<
*N. ,5
0
N O'
l | I 1 I I I I LJ.Bilaga B8
Nedförslut, Växel 1, 60 kmh, 4400 rpm, 256
medelvärdes-bildningar. 2:1 Q <3: (D r...<1' 1
/76
8
f
,25
45
1:5
16
1% %129g
*1 9Q J ...H E _ _ , 0 8 . ,§1 00 ;\ ha.. o \6 4 _. ... m-. _ ,.,-O v ,W .. 3 :3På'
52
gg
23
, N,V
i;
;å qo 4
__ . 0 : N g 1 l I l ! VTI MEDDELANDE 45Bilaga B9 Uppförslut, Växel 2, 40 kmh, 1700 rpm, bildningar. 16 medelvärdes-ZOIü VTI MEDDELANDE 45 HD 2a' 2%
Bilaga B10
Nedförslut,
växel2, 40 kmh, 1700 rpm, 16
medelvärdes-bildningar.
x?? _ 4 dB
__50 100 150 200 250 300
Bilaga 311
Uppförslut, Växel 2, 80 kmh, 3600 rpm, 256 medelvärdes-bildningar. I I I I 1 i.. -h » .m -4 dB BOIQE 4
.40-M_L
.
1
422
_1_ E __ D _fa_ V ._Tj
Jm
544/ _ Dum_ 704 . -v %0 %H 70%9 M92 .|__ _ ' 200 400' 600 800 1000 1200 wmc_ IL ;AD A jk_ -J VTI MEDDELANDE 45Bilaga B12
Nedförslut, Växel 2, 80 kmh, 3600 rpm, 256
medel-Värdesbildningar. 40 ° 4 dB BOIR
\ 71 D
Våg _-W
A
A
_
_._DW
,, 609 .
:200
i 400
600
800
1000
VTI MEDDELANDE 45040
1200 1332.Bilaga B13 100 kmh, 4600 rpm, 256 medel-1- Nedförslut, Växel 2, Värdesbildningar. 2. Störningar från bandspelare I 80 Hz
200 400 600 VTI MEDDELANDE 45 âä xp
Bilaga B14
Uppförslut, Växel 3, 60 kmh, 2000 rpm, 256
medel-Värdesbildningar. 4 dB 80'Hz 4420 f07%: 400 600 800 1000 200 VTI MEDDELANDE 45
1200'
Bilaga C
Manual för ljudsystem variant 1
Denna del vill ge dig kunskap att göra till- och från-slag på systemet, att kontrollera att den rekommenderade inställningen är gjord och att göra smärre ingrepp i
hårdvaran. För grunduppkoppling se fig. C.l.
g'
v43> KOPPLINGSPLINT <:h:: FRÅN HYBRIDDATOR
o
C)
KOPPLINGSPLINT
STYRPANEL
F
">
4 POTENTIOMETRAR KOPPLINGSPLINT 1234 1 2 3 4 5 6 TILL TGN'65
GENE'
DBRUS-_
.FRÅN
ATOR
GENE_
KRAFTAGGREGAT LJZigl
RATOR
w220V l 3 STYRBART FILTER 5 -4 4 SPÄNNINGS*
STYRD FÖR-
TILL/FRÅN
STÄRKARE 6 -4H OKTÃV . MIXER i FILTER .L--bui<, -
U] ;214 EFFEKT-VOLYM. ÖRSTÄRKARE r-j I L-I F__1 L-J SÄKRINGAR HÖGTALAREFigur C.l Symboliskt schema för grunduppkOppling av
hårdvaran. VTI MEDDELANDE 45
Till- och frånslag
Finn de båda volymkontrollerna på mixern. Dra ner dessa
till maximal dämpning. Finn påslagsknapparna på kraft-aggregat ooh effektförstärkare. Slå till strömmen ( lampan lyser ). Öka volymen till önskad nivå.
Systemet skall nu ge ett billiknande ljud då du styr
fordonsmodellen från styrpanelen,
om inte:
kontrollera säkringarna bak på högtalarna
kontrollera varje modul för sig. Börja med MIXER 3202 (fig. C.2)
Endast kanal 1, 2 och 4 används.
Kanal 1. O dB 2. -6 dB 3. -00 4. O dB
_4_
nu-l 2 'ä' 4
Mmmm
\_l\l/
1//'
Balanskontroll - RAKT UPP
Figur c.2
Inställning av Mixer 3202
TONGENERATOR 3002
Endast kanal 1 och 2 används
1
2
LIN.
_LIN.
® ® OFF'e OFF'9 Modulationsval
O/QE) ()QEÖ 40423 (JQEÖ Frekvens (KHz)
0,46:) 0,46:) 0(23 ()QZ> Grad av övertoner
(0-1)
Efjt7
çEj F7
2;?
g:)
Utnivå (dB)
l
4;
Till kanal 1 resp 2 på STYRBART FILTER 3103
Figur C.3 Inställning av tongenerator 3002
BRUSGENERATOR 3004
2?
C25/3755 i
Till kanal 4 på STYRBART FILTER 3103Figur C.4 Inställning av brusgenerator 3904
STYRBART FILTER 3103
Endast kanal 1, 2 och 4 används
FRÅN TONGENERATOR
i
FRÅN BRUSGENERATORi
Cgö/OQ
(D
0ø
Filterval Q-Värde Centerfrek-vens Den ostyrda insignalens utniVå Omkopplare - MITTENLÄGEFigur C.5 Inställning av filter 3l03
SPÄNNINGSSTYRD FÖRSTÄRKARE 3104 Endast kanal 1, 2 och 3 används.
Endast de utritade rattarna fyller någon funktion
Omk0pplare - MITTENLÄGE
Figur C.6 Inställning av förstärkare 3104
VTI MEDDELANDE 45
Den ostyrda insignalens utnivå
OKTAVFILTER 3101
8 '
" 8
__u "-E: E: I +12 gêêåkt-Från ' 3 .. .. forstarkareMIXER
Ej
i E :3 .--..
L.J. O
E21
-12-
E3
Figur C.7 Inställning av filter 3101
Detta filter påverkar hela ljudbilden, och dess inställ-ning beror nästan uteslutande av lyssinställ-ningsrummets para-metrar. Den rekommenderade inställningen grundar sig på den faktum att de låga frekvenskomponenterna är domine-rande inuti bilen, karossen har ofta en resonanstOpp kring 250 Hz och de höga frekvenskomponenterna dämpas väl ut av karosseriet. DE 4 POTENT IOMETRARNA l Skalfaktor 0.020 2. " 0.010 3 " 0.606 4 " 0.236 1 3 . . Grå till ;ord 2 Röd VTI MEDDELANDE 4 5